

以前レビューした「Apitor Robot Q」には20種類の作例があります。
今回はその中の一つの「シーソー」について詳しく紹介します。
- 【Apitor Robot Q】シーソーのレビュー
シーソーはコレまでのApitor Robot Qシリーズの作例にも使われているリンク機構を使って動いています。シンプルな動作をお楽しみください。

【Apitor Robot Q】シーソーのレビュー
「スイング」の分解
今回は、前回作った「スイング」を分解するところから始めます。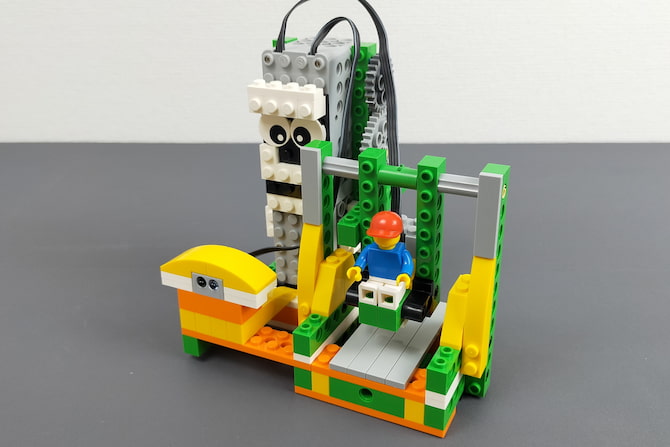
Apitor Robot Xに付属していたブロック外しは使いにくかったのですが、Apitor Robot Q/Sに付属するものはかなり使いやすくなってました!(ほぼレゴブロックのブロック外しと同じ形です。)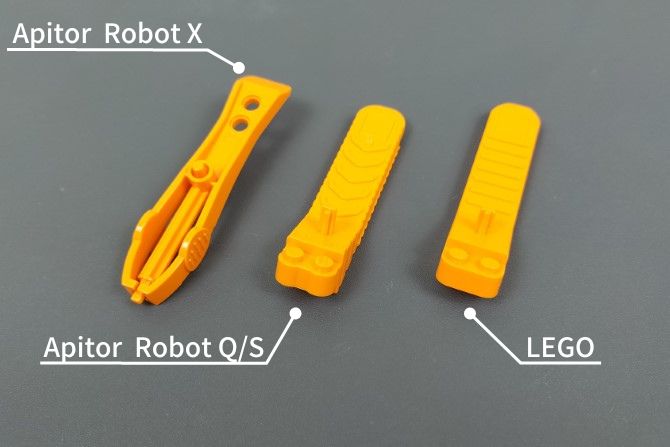
私は10分くらいで分解できました。小さなパーツは予め仕分けしておくといいですね。
組み立て
組み立ては専用アプリの説明書を見ながらおこないます。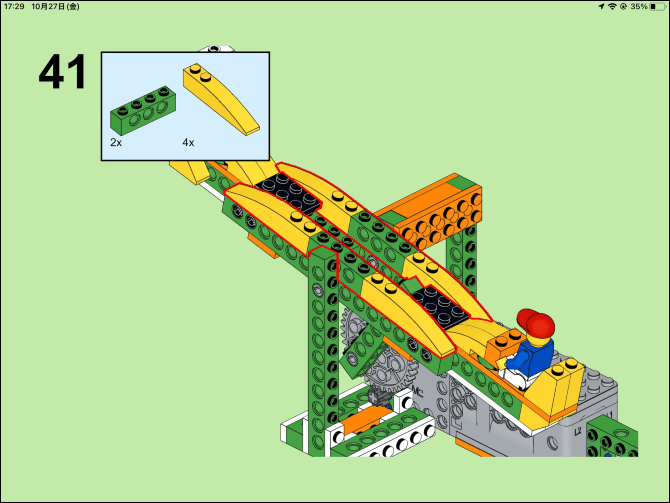
完成!
そして、完成したものがこちらです!15分くらいで完成しました。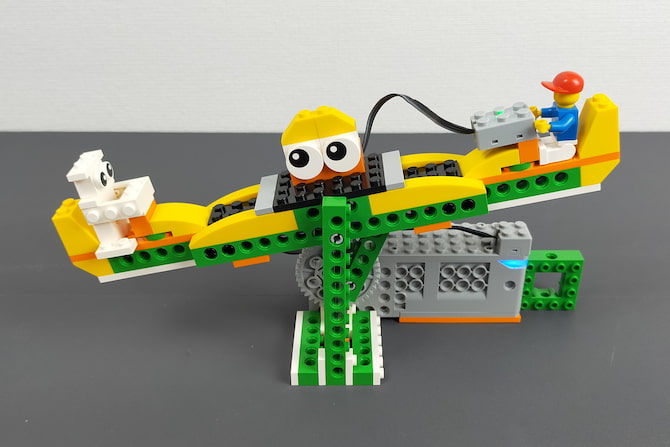
後ろから見るとこんな感じ。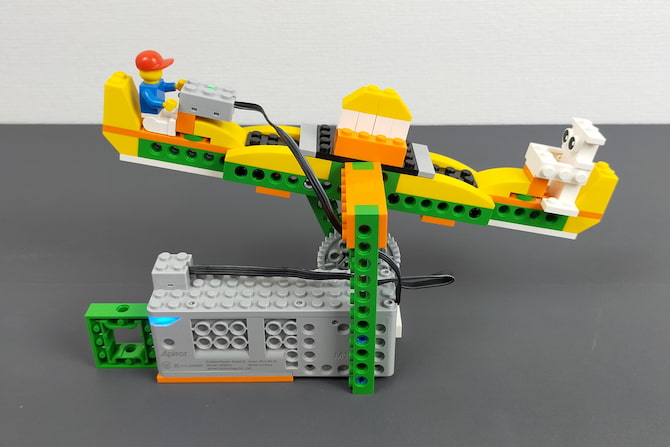
シーソーに人が乗ってます。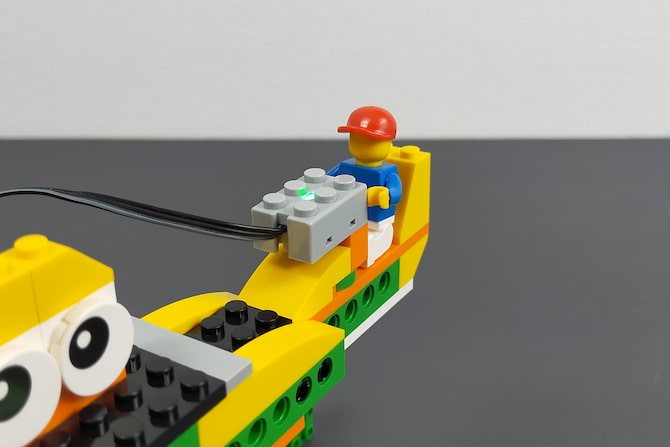
反対側にはロボット?が乗ってます。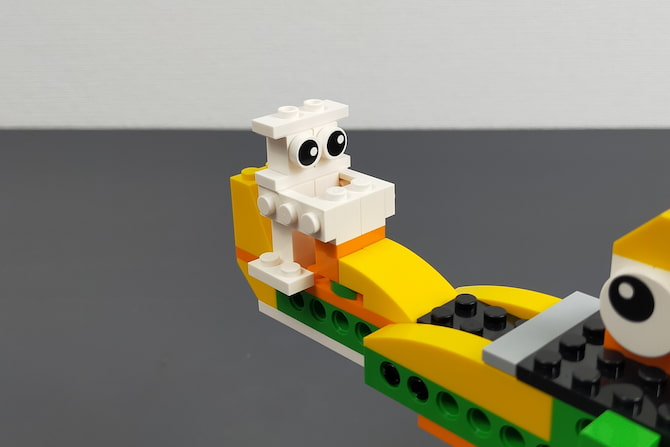
あと、なぜか大きい顔がついてます。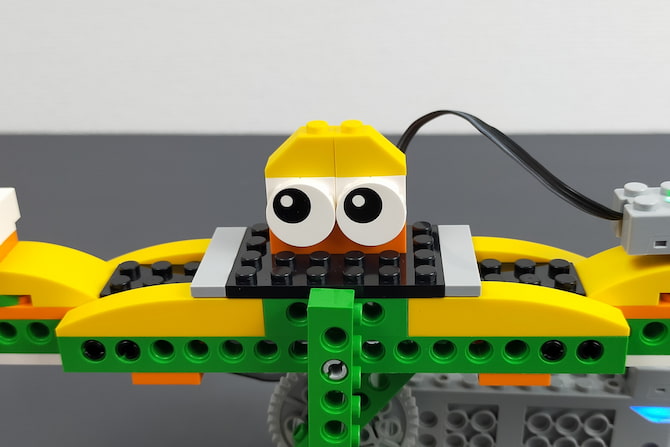
そして、ペットボトルと比べるとこんな感じです。
手動で可動する箇所
手動で可動する箇所は次のとおりです。
- なし
モーターで動く箇所だけです。
リモコン操縦
リモコン操縦で可動する箇所は次のとおりです。
- シーソー
操縦は専用アプリでおこないます。ゲームのコントローラーのようになっています。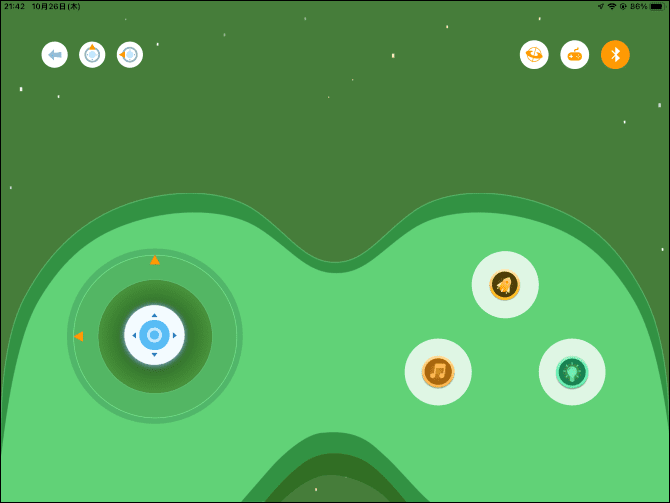
リモコン操縦する様子はこんな感じです。
動く部分はこんな感じでして、ギアが回転し、それをリンク機構で往復運動に変換しています。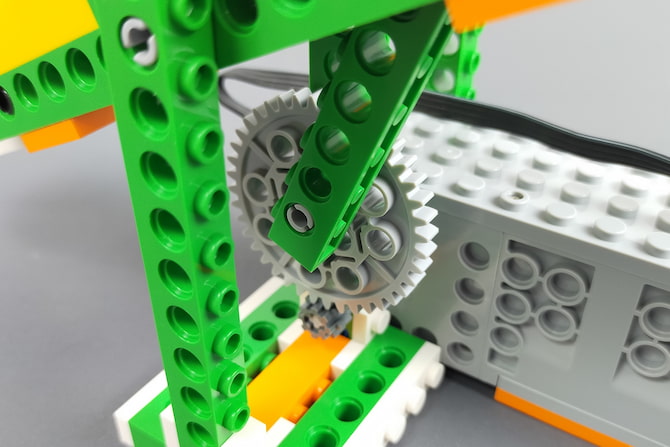
サンプルプログラム
プログラムで動作する箇所は次のとおりです。
- シーソー
プログラムを実行するとこんな感じです。
カラーセンサーに色ブロックを読み取らせることでシーソーが動く仕組みです。読み取る色によって速度が変わります。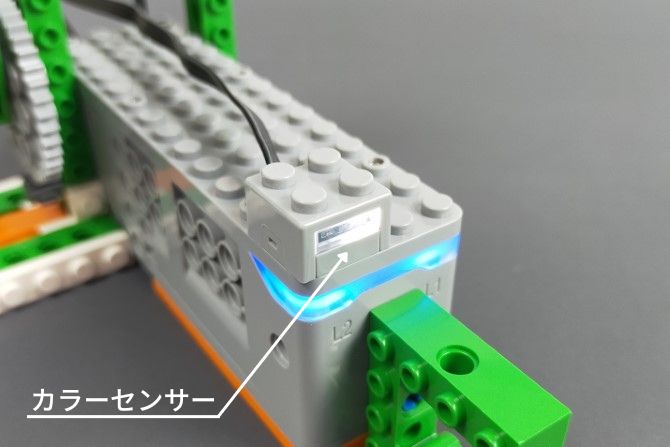
また、赤外線センサーがミニフィグを検知する間は動き続けます。ミニフィグを下ろすと停止します。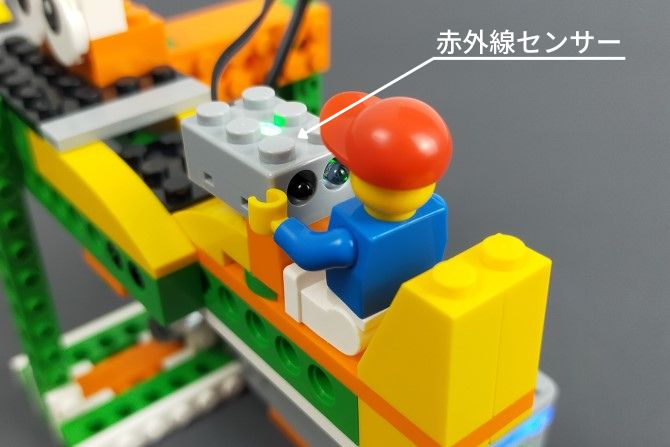
結論:シンプルなシーソー
今回もApitor Robot Qシリーズではおなじみのリンク機構でシーソーを動かしました。
また、他の作例のレビュー記事もよろしければどうぞ。(タップでジャンプ)



















それでは Apitor Robot Qを楽しんでください(^^)/~~~