
ハロー・ワールド!おもちゃ大好きエンジニアの大之助( @daivoy_x)です!
マイコンロボット工作セットを作ってプログラミングしようと思ったのですが、公式サイトのどこを見たら情報が載っているのかわかりづらくて必要な情報を探し出すのに苦労しました。
なので情報を整理していきます。
- マイコンロボット工作セットをプログラミングするために必要な情報
網羅的に情報を整理したのでプログラミングのお役に立てると思いますm(_ _)m
スポンサーリンク
![]()
マイコンロボット工作セットをプログラミングするために必要な情報
マイコンロボット工作セットのラインナップ
マイコンロボット工作セットは今のところ2種類あるようです。
- マイコンロボット工作セット(クローラータイプ)
- マイコンロボット工作セット(ホイールタイプ)
違いはロボットの形だけです。マイコンやセンサーは同じものを使用しているので、作れるプログラムは同じです。
車輪部分の違いはありますが、モーターを動かすプログラムは同じなので、購入するときは見た目で選べばいいですよ。
内蔵プログラムの動作確認
本キットには既にプログラムが書き込まれています。まずは内蔵プログラムを動かして動作確認をしましょう。
手順は次のとおりです。
- 電池を入れる
- 電源スイッチをONにする
- ボタンAを押す(もしくはしばらく待つ)
内蔵されているプログラムは障害物を避けながら進みます。動きは次のとおりです。
- 超音波センサーが前方の障害物を検知しない場合
直進する - 超音波センサーが前方の障害物を検知する場合
ブザーが鳴り、左右どちらかに曲がる
以上の動作が確認できたら内蔵プログラムの動作確認は完了です。
サンプルプログラムのダウンロード
メーカーからサンプルプログラムが提供されています。
サンプルプログラムの在り処は公式サイトの下記の部分です。(けっこう下の方です)
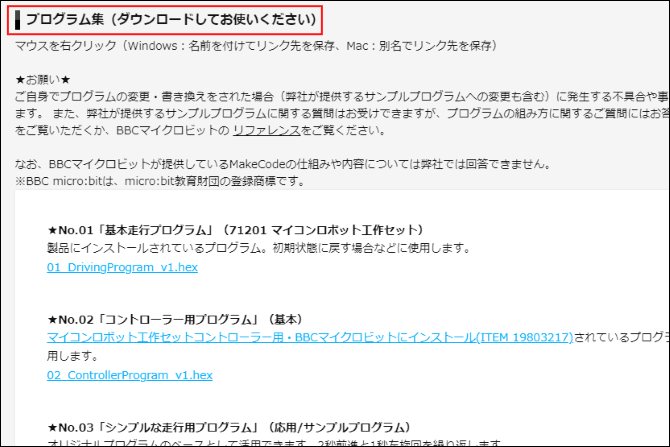
マイコンロボット工作セット(クローラータイプ)のサンプルプログラムはこちら
マイコンロボット工作セット(ホイールタイプ)のサンプルプログラムはこちら
次は実際にプログラムを書き込む手順について見ていきましょう。
プログラムを書き込む手順
プログラムを書き込む手順は簡単です。
1.パソコンとmicro:bitをUSBケーブル(別売)で接続します。(ロボットの電源はOFFのまま)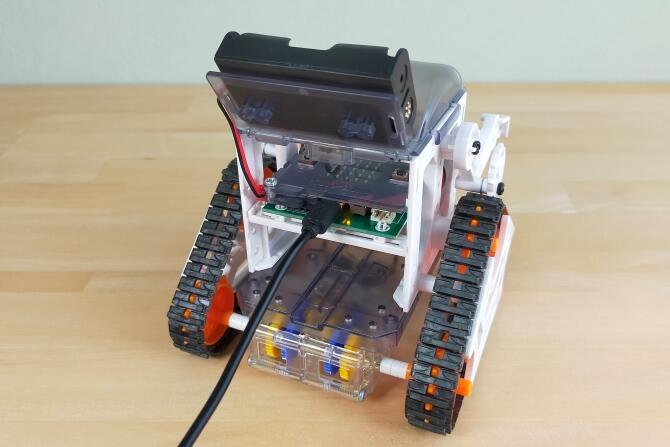
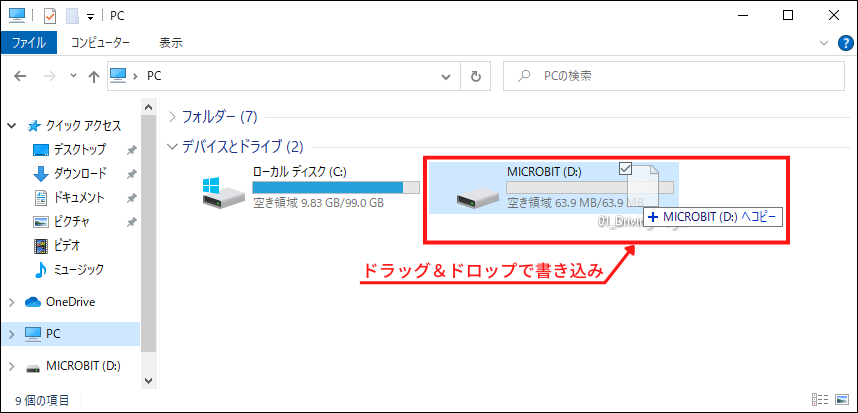
2.正常に接続できるとMICROBITという名前のドライブがPCに表示されます。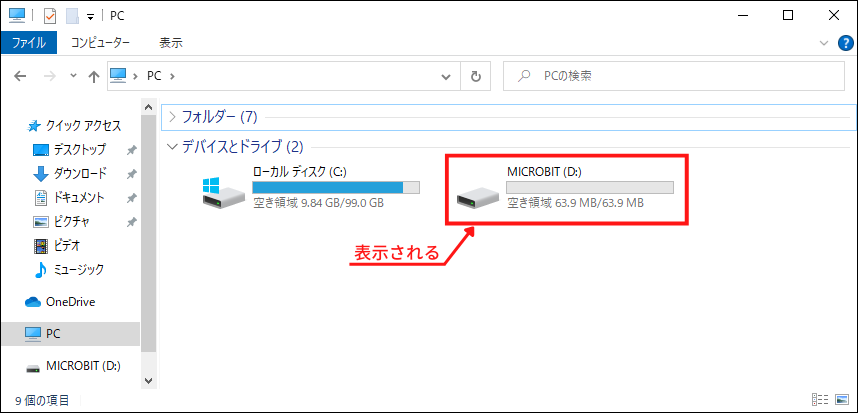
3.MICROBITドライブにプログラムをドラッグ&ドロップします。
4.micro:bitからUSBケーブルを抜いて、ロボットの電源を入れて動作確認をします。
プログラムの書き込み方法がわかったら、オリジナルプログラムを作ってみましょう!
オリジナルプログラムを作る方法
オリジナルプログラムを作るためには「どの端子にモーターが接続されているのか」などのロボットの仕様を知りたいですよね。なので、まとめました。
ロボットの仕様
まず、基盤とmicro:bitの構成図です。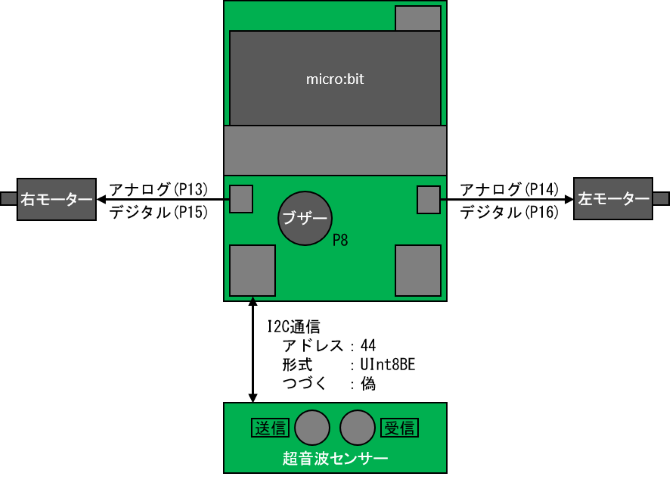
ピン配置は次のとおりです。
| P8 | ブザー |
| P13 | 右モーターの回転速度(アナログ) |
| P14 | 左モーターの回転速度(アナログ) |
| P15 | 右モーターのブレーキ(デジタル) |
| P16 | 左モーターのブレーキ(デジタル) |
モーターの制御(回転)
モーターの回転速度は次のようにプログラミングします。
| 回転速度 | 後進方向に最大 | ~ | 停止 | ~ | 前進方向に最大 |
| 値 (アナログ) |
0 | ~ | 511 | ~ | 1023 |
モーターの制御(ブレーキ)
また、モーターにはブレーキがあります。
これは「モーターが回転することを許可するか禁止するか」というイメージです。
ブレーキは次のようにプログラミングします。
| ブレーキ | OFF | ON |
| 値 (デジタル) |
0 (回転許可) |
1 (回転禁止) |
モーターのプログラミング方法
ロボットを前進させたり、左折させたりするにはモーターのプログラミング方法を知らないといけません。
モーターをプログラミングする方法はQ&Aページの下記に書いてあります。
ブザーのプログラミング方法
このロボットの回路にはブザーが搭載されているので、音階やメロディーを鳴らすプログラムを作ることができます。
ブザーを鳴らす方法はQ&Aページの下記に書いてあります。
モーターのプログラミング方法
ロボットを前進させたり、左折させたりするにはモーターのプログラミング方法を知らないといけません。
モーターをプログラミングする方法はQ&Aページの下記に書いてあります。
超音波センサーのプログラミング方法
ロボットが障害物を検出するには超音波センサーのプログラミング方法を知らないといけません。
超音波センサーをプログラミングする方法はQ&Aページの下記に書いてあります。
ただ、これは結構難しいので、丁寧な解説記事を下記に詳しく書きました。あわせて御覧ください。
これらの情報があれば、ロボットを動かすプログラミングを作れるでしょう。
ロボットを無線操作する方法
マイコンロボット工作セットは、もう一台micro:bitを用意すればコントローラーにしてロボットを操縦することができます。
ロボットをコントローラーで操縦するときの構成は次のとおりです。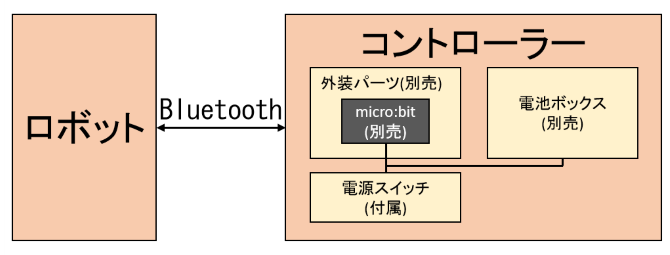
上記の通り、別途必要な部品を用意する必要があります。
必要な部品は次のとおりです。
- コントローラー用micro:bit
・・・別売り - 電池ボックス
・・・別売り - 電源スイッチ
・・・マイコンロボット工作セットに付属 - ケース用のパーツ
・・・別売り(無くても操縦可能) - コントローラー用プログラム
・・・公式サイトからダウンロード
これらはタミヤショップオンラインから購入することができます。
まとめ:マイコンロボット工作セットを楽しもう!
本記事では「マイコンロボット工作セットのプログラミングに必要な情報」について整理しました。
少しでもプログラミングのお役に立てたら幸いです。
では、マイコンロボット工作セットを楽しんでください(^^)/~~~