
以前レビューした「mBot2」とパソコン(mBlock5)を接続するには有線で接続する方法と無線で接続する方法の2種類があります。
- 有線接続と無線接続のメリット・デメリット
- 【有線/無線】mBlock5(PC版)とmBot2の接続方法
それぞれ、メリットとデメリットがありますが、無線接続がおすすめです。理由も含めて詳しく解説します。
スポンサーリンク
![]()
有線接続と無線接続のメリット・デメリット
有線接続と無線接続のメリットとデメリットは次のとおりです。
| メリット | デメリット | |
| 有線接続 | USBケーブルが付属 | PCと接続した状態で動かすときに動かしにくい |
| 無線接続 | 専用Bluetoothドングルが別売り | PCと接続した状態で動かすときに動かしやすい |
有線接続は付属のUSBケーブルを使えばいいですが、無線接続をするには別売りの専用Bluetoothドングルを購入する必要があります。
また、ロボットを動かすときにPCからプログラムを実行する方法があるのですが、有線接続だとケーブルが絡まって自由に動かせず、無線接続ならそんなストレスがありません。
どちらも試してみましたが、私は圧倒的に無線接続が便利で良かったです。

とはいえ、接続方法はどちらもほとんど同じなので、さっそく見ていきましょう。
【有線/無線】mBlock5(PC版)とmBot2の接続方法
mBlock5とmBot2を接続する手順の全体像は次のとおりです。
- 【有線】1.PCとロボットをUSBケーブルでつなぐ
- 【無線】1.PCとロボットをBluetoothでつなぐ
- 【共通】2.デバイスにCyberPiを追加する
- 【共通】3.mBlock5とロボットを接続する
簡単です。順番に解説しますね。
【有線】1.PCとロボットをUSBケーブルでつなぐ
有線接続の場合はまず、PCとロボットを付属のUSBケーブルでつなぎ、ロボットの電源をONにします。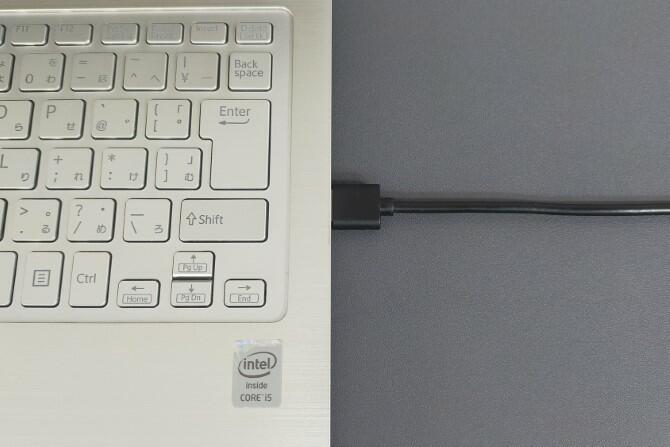
次は「【共通】2.デバイスにCyberPiがあることを確認する」へジャンプしてください。
【無線】1.PCとロボットをBluetoothでつなぐ
無線接続の場合はまず、PCに別売りの専用Bluetoothドングルを挿し、ロボットの電源をONにします。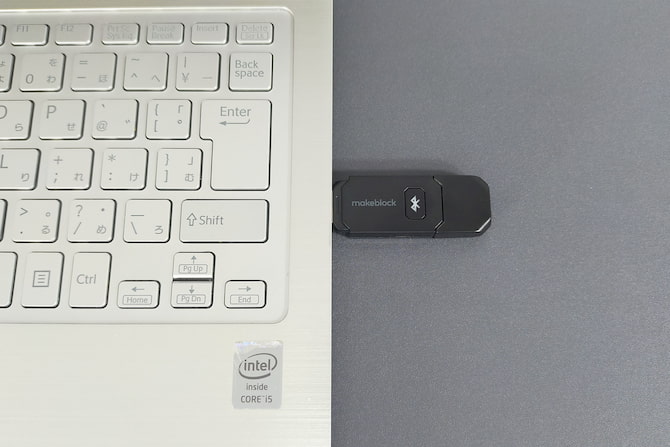
最後に、専用Bluetoothドングルのボタンを押します。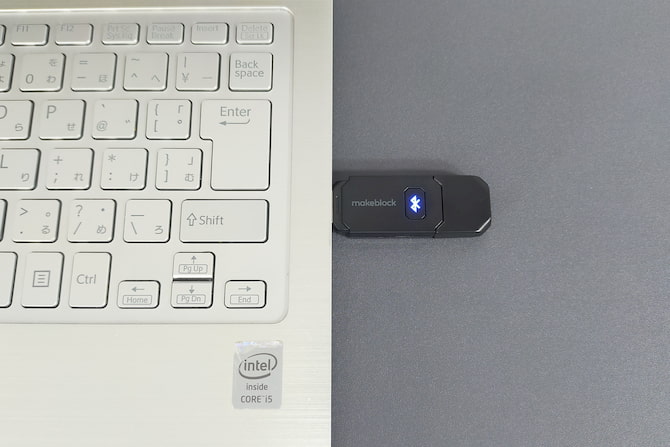
次は「【共通】2.デバイスにCyberPiがあることを確認する」へジャンプしてください。
【共通】2.デバイスにCyberPiを追加する
ここからは有線接続の場合も無線接続の場合も同じ手順です。
まず、mBlock5を起動し、[追加]をクリックします。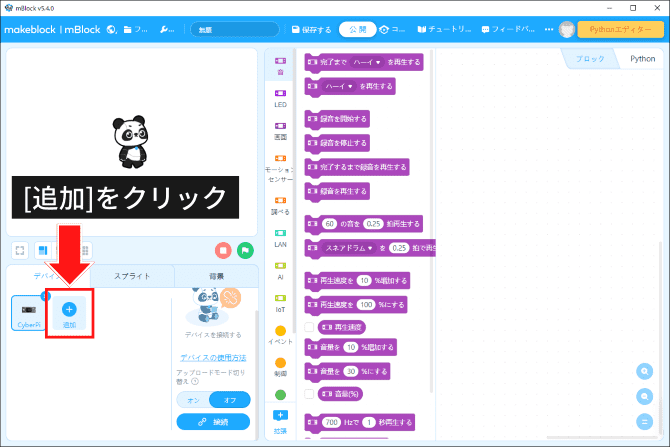
そして、「CyberPi」の右上にある[ダウンロードボタン]をクリックします。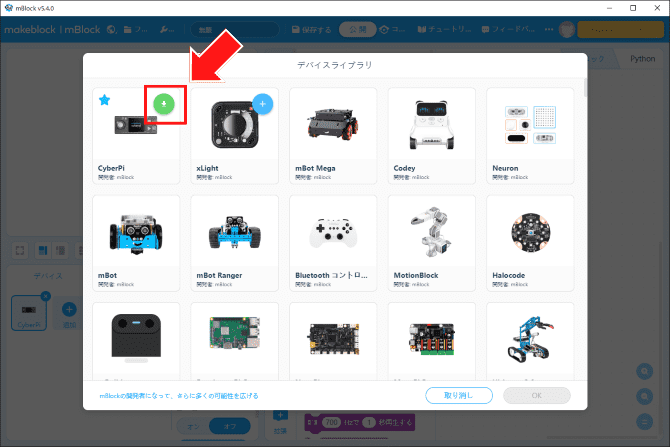
ダウンロード中です。しばらく待ちます。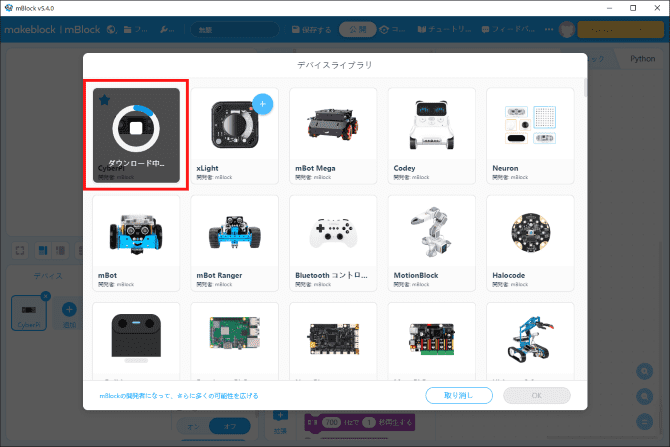
「CyberPi 正常にインストールされました」と表示されたらダウンロード完了です。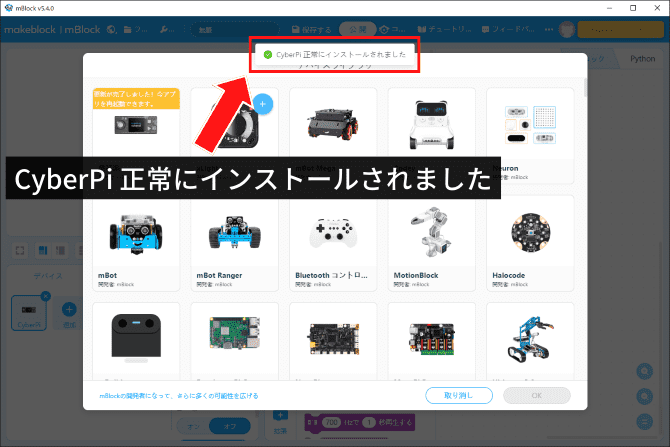
そして、[取り消し]をクリックします。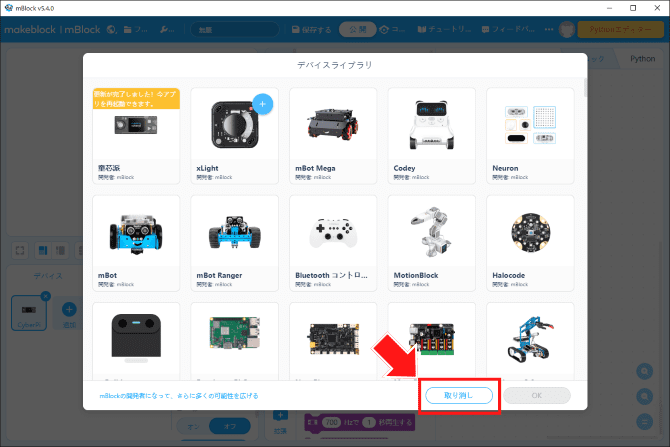
すると、元の画面に戻ります。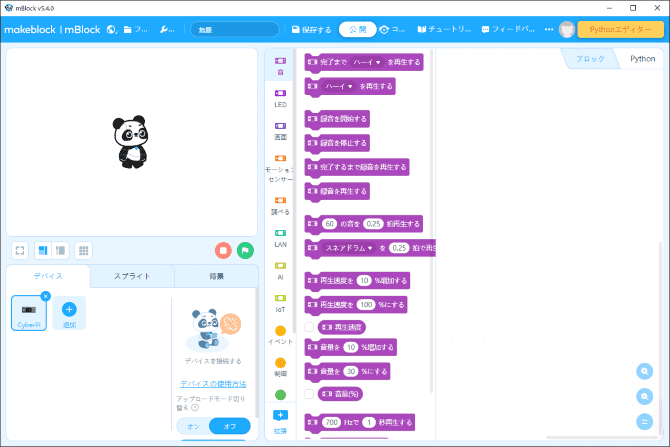
【共通】3.mBlock5とロボットを接続する
[接続]をクリックします。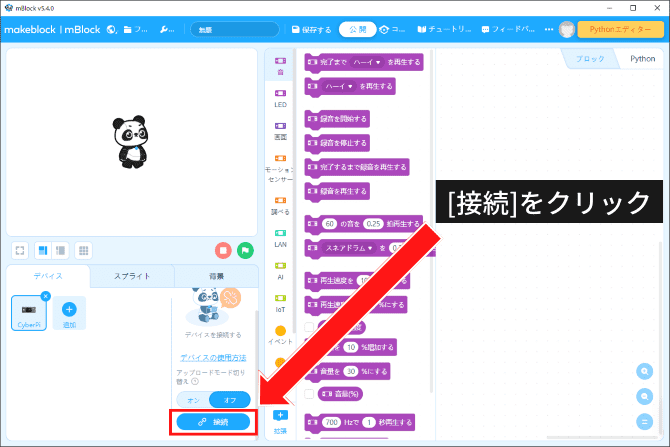
[USB]を選択し、[接続]をクリックします。無線接続の場合も[USB]を選択します。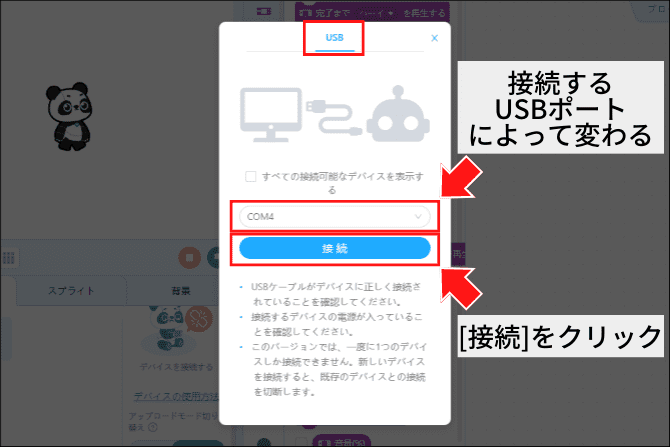
「接続しました。」と表示されたら接続完了です。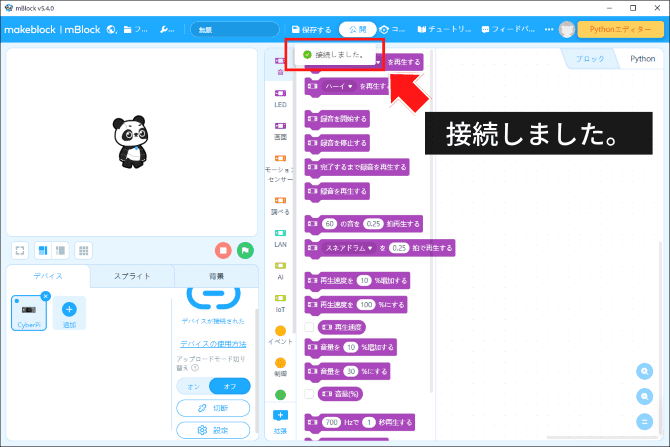
拡大するとこんな感じです。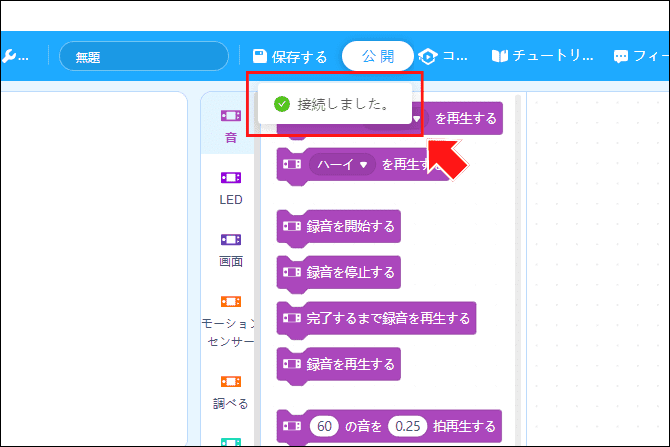
これで接続完了です。お疲れ様でした。
次はロボットのファームウェア更新
これで「mBot2」とmBlock5を接続できました。
次は「mBot2」のファームウェアを更新します。ロボットのファームウェアを最新にしておけば不具合なども少ないですし、安定して動作します。
mBot2のファームウェア更新方法
また、AI機能を利用するには無料の会員登録が必要です。その方法はこちらの記事をご覧ください。簡単です。
無料の会員登録方法
それでは「mBot2」を楽しんでください(^^)/~~~