

アーテックロボ TRICERATOPSの組み立て手順にある「サーボモーターの校正」がわかりにくかったので詳しく丁寧に解説します。
- 【アーテックロボ】サーボモーターの校正方法を画像20枚で解説
サーボモーターの校正とはパソコン上のサーボモーターの角度と実際のサーボモーターの角度を一致させることです。
一致していないと、パソコン上で90°回転させるプログラムを書いても実際の角度は92°とか93°になったりします。
本記事を見ていただければ「取扱説明書を見たけどよくわからない!」という方でも「サーボモーターの校正」ができるようになるかなと。
【アーテックロボ】サーボモーターの校正方法を画像20枚で解説
サーボモーターを校正する全体の流れは次のとおりです。
- 0-1. サーボモーターに番号シールを貼る
- 0-2. Studuino miniにバッテリー、サーボモーター×2をつなぐ
- 0-3. プログラミングソフトを公式サイトからダウンロードする
- 1. PCとStuduino miniをUSBケーブルで接続する
- 2. プログラミングソフトを起動する
- 3. サーボモーターの校正画面を開く
- 4. サーボモーターの角度を見ながらオフセット値を設定する
上記のとおりです。順番に解説しますね。
【準備】0-1. サーボモーターに番号シールを貼る
まず、次のようにそれぞれのサーボモーターに「D10」と「D11」の番号シールを貼ります。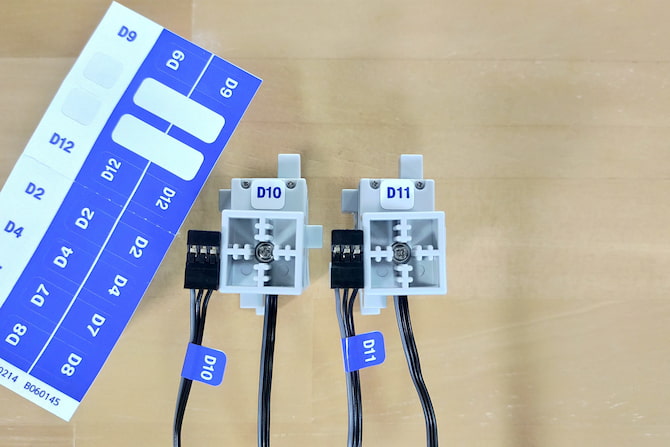
【準備】0-2. Studuino miniにバッテリー、サーボモーター×2をつなぐ
次はシールの番号とStuduino miniのピン番号をあわせてサーボモーターを接続します。
そしてバッテリーも接続します。このときはまだ電源をOFFにしたままです。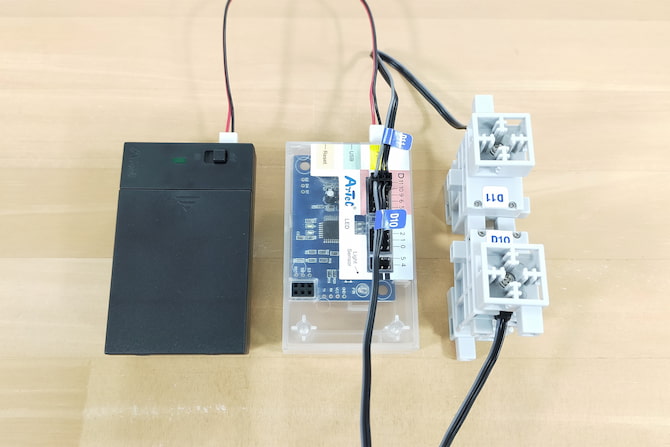
【準備】0-3. プログラミングソフトを公式サイトからダウンロードする
Studuino miniのプログラミングソフトを公式サイトからダウンロードします。
⇨ 公式サイトはこちら
ダウンロードしたファイル(Studuino_mini.zip)がこちらです。
このファイルを解凍します。
ファイルを右クリックし、[プログラムから開く > エクスプローラー]をクリックします。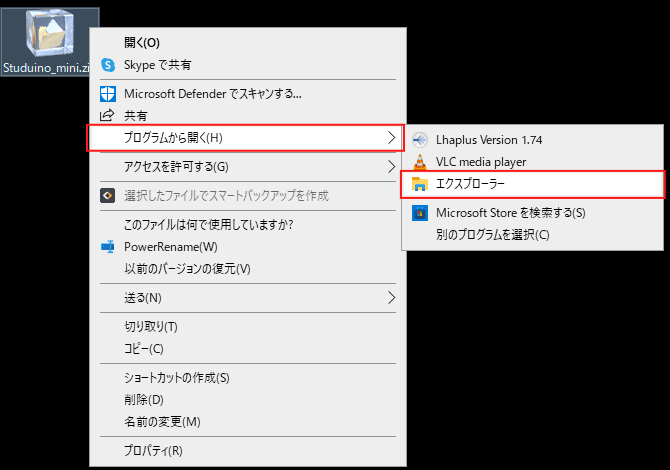
フォルダが開いたら、[すべて展開]をクリックします。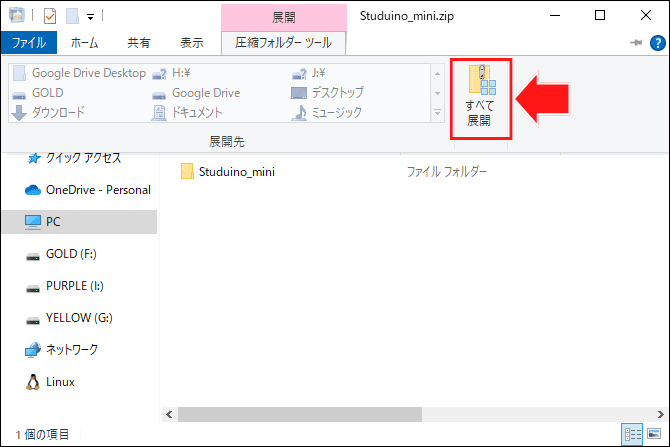
展開先が表示されるので好きな場所を選び、[展開]をクリックします。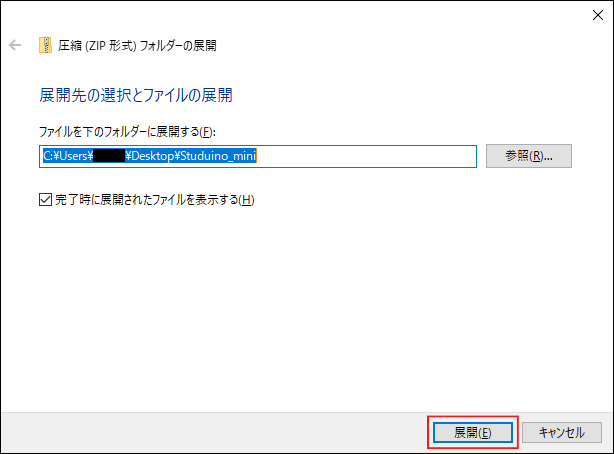
そうすると展開が完了します。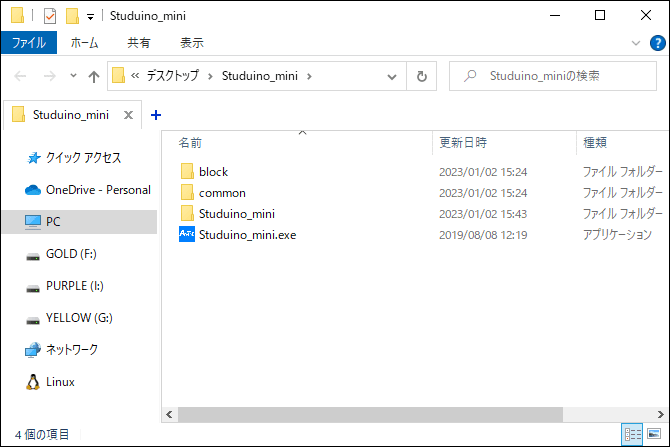
ここまでで、準備は完了です。
1. PCとStuduino miniをUSBケーブルで接続する
パソコン(PC)とStuduino miniを付属のUSBケーブルで接続します。
2. プログラミングソフトを起動する
手順0-3.で解凍した「Studuino_mini.exe」を実行してプログラミングソフトを起動します。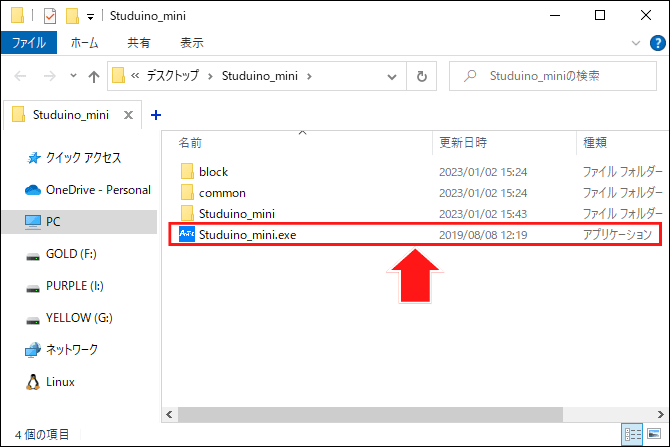
起動するとこんな感じの画面です。
3. サーボモーターの校正画面を開く
次は[編集 > モーター校正]を押します。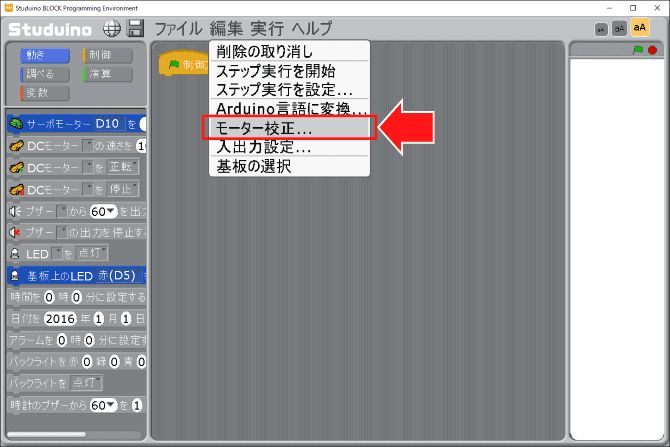
すると次のような表示がでます。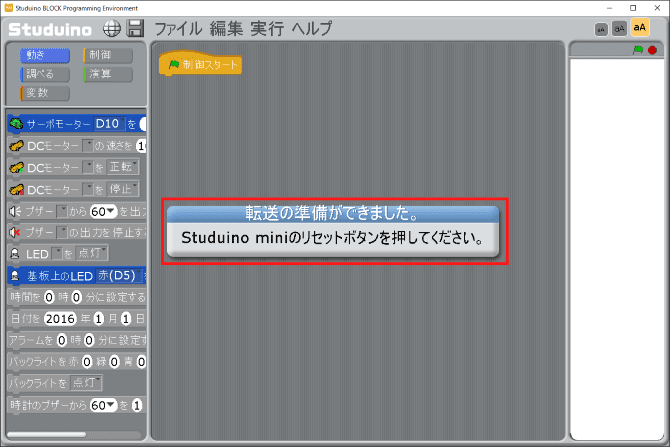
このタイミングで「Studuino miniのリセットボタン」を押します。
しばらくすると「モーター校正」画面が開きます。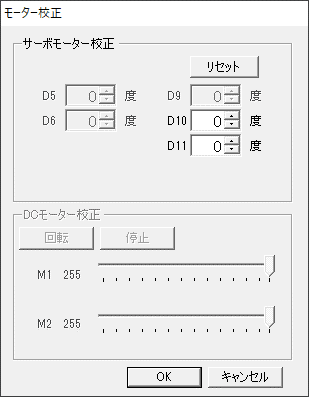
画面が表示されたらStuduino miniに接続しているバッテリーの電源をONにします。
4. サーボモーターの角度を見ながらオフセット値を設定する
「モーター校正」画面が開くと同時に自動でサーボモーターが90°に回転します。回転した角度がずれている場合は角度が正しくなるようにオフセット値を設定します。
上下の矢印ボタンを押すとサーボモーターがちょっとだけ動くので、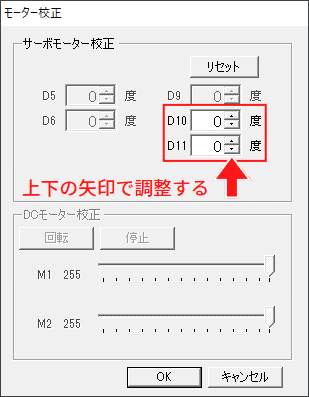
図の部分が揃うように調整します。(それぞれのサーボモーターを調整します。)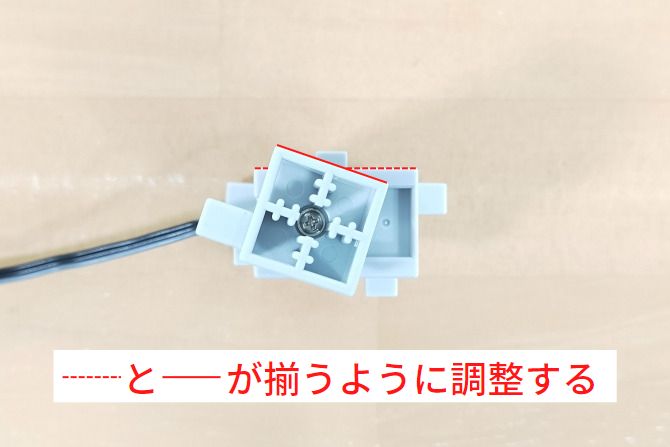
2つのサーボモーターのオフセット値を設定できたら[OK]ボタンを押して完了します。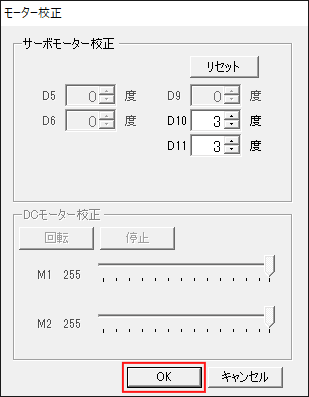
これでサーボモーターの校正は完了です。
[×]ボタンを押してプログラミングソフトを終了させましょう。お疲れ様でした。
サンプルプログラムを動かすには手を加える必要あり
本記事の手順ではサーボモーターを「D10」と「D11」に接続する方法を解説しました。
しかし、トリケラトプスのサンプルプログラムは「D5」と「D6」に接続したサーボモーターを動かすようになっています。
なので、サンプルプログラムをそのまま動かすことができません。
サンプルプログラムの修正方法はこちらの記事にまとめていますのであわせてご覧ください。
【アーテックロボ】トリケラトプスのサンプルプログラムの修正方法
それではアーテックロボを楽しんでください(^_^)/~