

以前レビューした「WhalesBot E7 Pro」には12種類の作例があります。
今回はその中の一つの「デューク」について詳しく紹介します。
- 【WhalesBot E7 Pro】デュークのレビュー
デュークは人形のロボットでクローラーで移動するタイプです。
前回の戦士とほとんど同じですが、頭部と連動して両腕が動くようになりました。

スポンサーリンク
![]()
【WhalesBot E7 Pro】デュークのレビュー
「戦士」の分解
今回は、前回作った「戦士」を分解するところから始めます。
私は20分くらいで分解できました。小さなパーツは予め仕分けしておくといいですよ。
組み立て
組み立ては専用アプリの説明書を見ながらおこないます。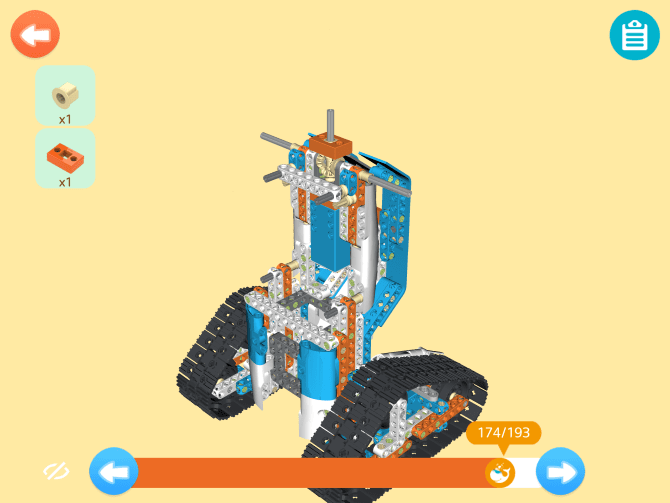
完成!
そして、完成したものがこちらです!1時間50分くらいで完成しました。左腕には赤外線センサー、右腕には押しボタンがあります。
顔を点けてみるとこんな感じです。目があると一気に見栄えが良くなりますね。
後ろから。腕に配線を通せているので割とスッキリです。
ぐるっと一周するとこんな感じ。(タップで拡大)




あおり気味に。
左腕は赤外線センサーです。距離を検知するためのものですが、なんかキャノンにも見えますね。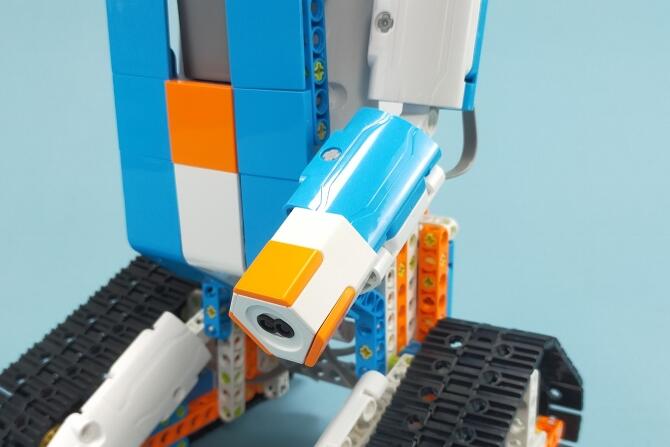
右腕は押しボタンと銃口が造形されてます。
クローラー。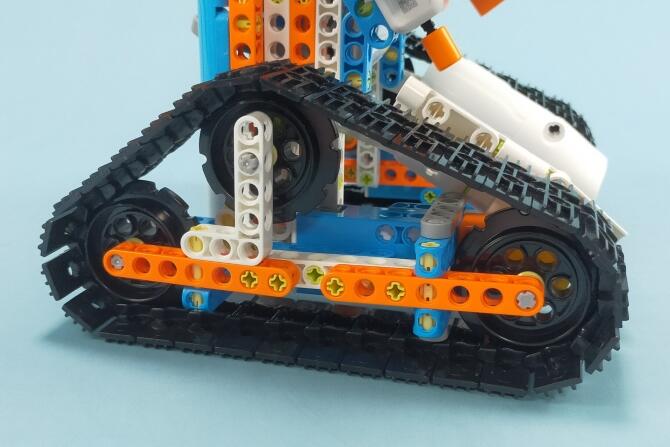
そして、背中の構造がイマイチでして、説明書通りに組み立てましたが、長さが短くてかなり無理矢理接続しています。
そして、ペットボトルと比べるとこんな感じです。
手動で可動する箇所
手動で可動する箇所はありません。
リモコン操縦
リモコン操縦で可動する箇所は次のとおりです。
- 右クローラー
- 左クローラー
操縦は専用アプリでおこないます。ゲームのコントローラーみたいです。「こんにちは」ボタンを押すと喋って、頭と腕を動かします。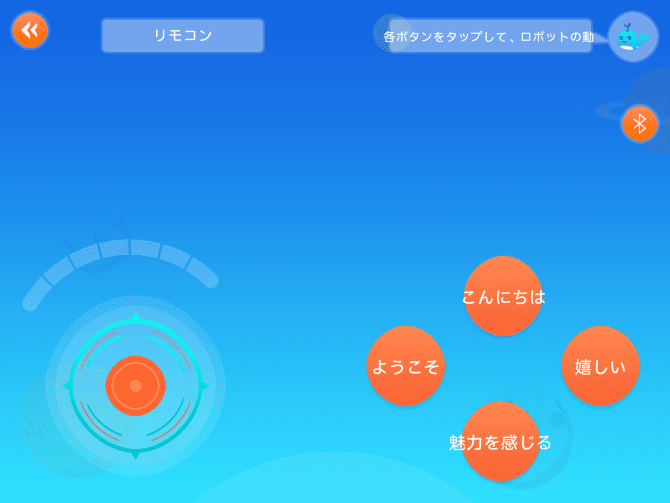
実際に動かしてみた様子がこちらです。タイヤタイプより安定して走行しますね。
プログラミング
プログラムで動作する箇所は次のとおりです。
- 右クローラー
- 左クローラー
- 頭部
実際に動かしてみた様子がこちらです。障害物を検知するまでは前進し、障害物を検知したら後退して停止します。このときに目も変わります。
結論:構造がイマイチなロボット
ボリュームが凄くて概ねかっこいいのですが、背中の接続や赤外線センサーの位置がイマイチで、ちょっと惜しい作例でした。
ぜひ、改良してみてください。
また、他の作例のレビュー記事もよろしければどうぞ。












それでは、WhalesBot E7 Proを楽しんでください(^^)/~~~