
以前レビューした「F503i」は同じメーカーのembotというロボットと連携することができます。
▼本記事の内容
- 【小学8年生|F503i】embotの連携 ~キー入力編~
前回は光センサーを使ってembotと連携しました。
今回はキー入力を使ってembotを操縦したいと思います。
スポンサーリンク
![]()
【小学8年生|F503i】embotの連携 ~キー入力編~
F503iとembotの関係
おさらいですが、F503iとembotを連携するときの構造は下記のとおりで、アプリにそれぞれを接続し、アプリを介してF503iとembotが連携します。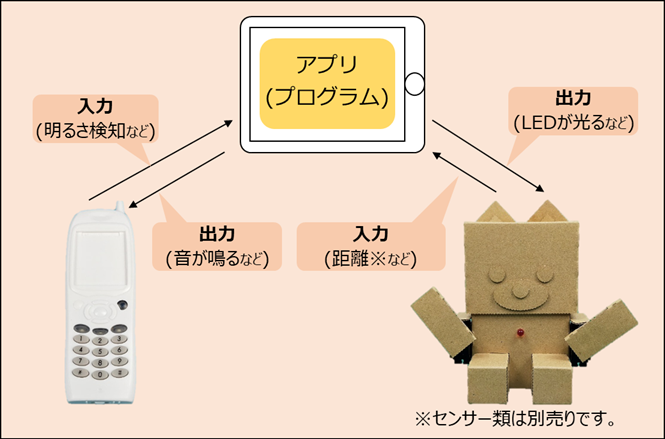
今回はF503iのキー押下を入力とし、embotの腕(サーボモーターの角度)を出力にします。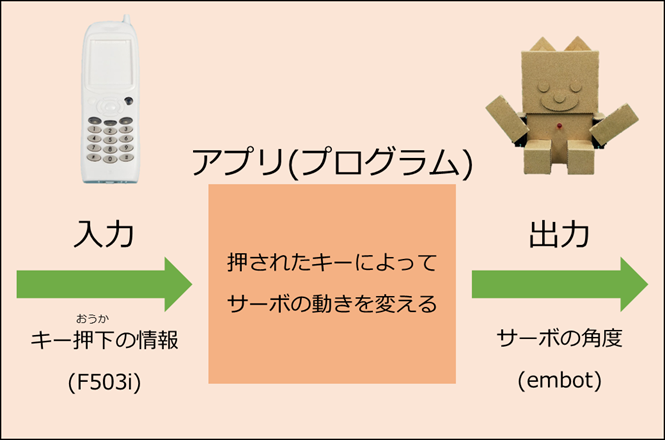
embotの追加
embotをアプリに追加する手順はF503iを追加した手順と同様です。F503iの代わりにembotを使うだけです。
以前の記事(F503iを追加したときの手順)を参考にしてください。
F503iとembotの連携 ~キー入力編~
具体的なプログラムを作っていきます。今回のプログラムの仕様は下記のとおりです。
- 1キー押下:左手を右に
- 3キー押下:左手を左に
- 7キー押下:右手を右に
- 9キー押下:右手を左に
- 0キー押下:中央にリセット
上記のとおりです。
F503iのキーが押されたら、押されたキーによって変数を変化させて、その変数の値通りにサーボモーターを動かします。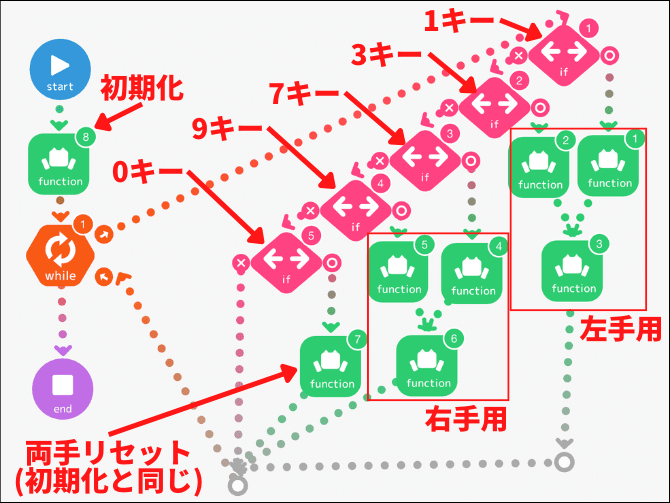
まずは、embotの腕を初期位置である中央(90度)にします。また、それに合わせて変数を90度で初期化します。(0キーが押されたときもこの処理を呼び、初期位置にリセットします)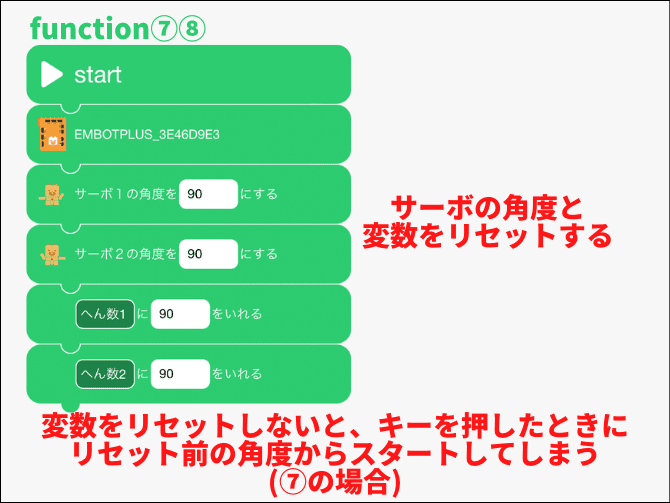
右に動かすときは変数を+10し、左に動かすときは-10します。そして、その値で腕(サーボモーター)を動かします。最初は90度から始まるので、90±10度の角度へ動きます。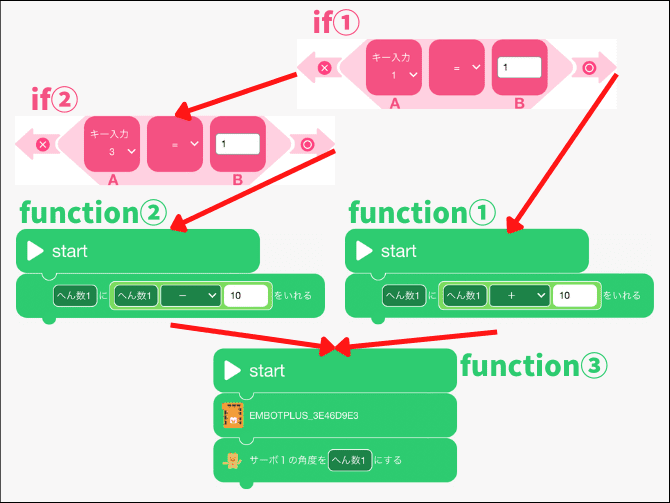
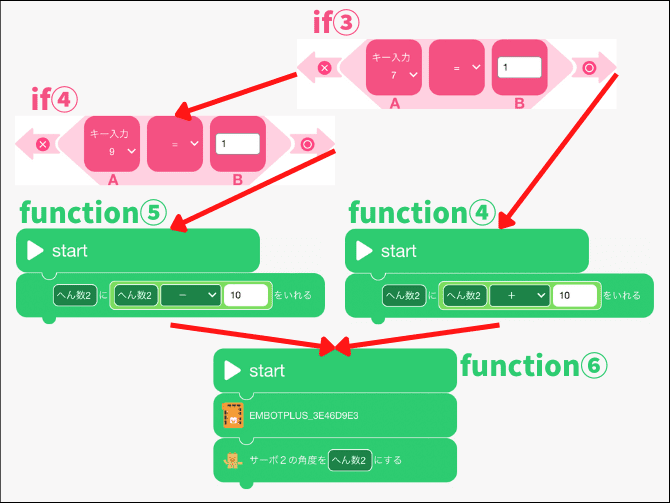
腕のプログラムは左右とも同じ考え方です。
実行結果は下記のとおりです。
if文が多段になると後半のif文は処理速度が遅くなりますね。これはif文のタイミングでキーが押されていないと処理が進まないからです。
まとめ
本記事のおさらいです。
- F503iのキー入力によってembotの動きを変えられる
- embotの登録手順はF503iと同様
- if文のタイミングでキーが押されてないと判定されない
上記のとおりです。
今回はF503iを入力装置として使い、embotを出力装置として使いました。
もちろん逆も可能なので、色々考えてみてください。
他の使い方
他の使い方は下記の記事にまとめています。

それでは、F503iを楽しんでください(^_^)/~

