

以前、アーテックロボの「サーボモーターの校正」をしたときに、サーボモーターを接続するピン配置を変更しました。
本記事では、それに伴って修正が必要なトリケラトプスのサンプルプログラムについて解説します。
- 【アーテックロボ】トリケラトプスのサンプルプログラムの修正方法
プログラムを変えるだけではなく、基盤の設定も変える必要があるので画像付きで詳しく解説します。
本記事を見ていただければ基盤の設定方法やサンプルプログラムの修正方法がわかるようになります。
スポンサーリンク
![]()
【アーテックロボ】トリケラトプスのサンプルプログラムの修正方法
サンプルプログラムを修正する全体の流れは次のとおりです。
- 0. サンプルプログラムをダウンロードする
- 1. サンプルプログラムを開く
- 2. 入出力設定をする
- 3. サンプルプログラムを修正する
上記のとおりです。順番に解説しますね。
【準備】0. サンプルプログラムをダウンロードする
まずは、トリケラトプスのサンプルプログラムを公式サイトからダウンロードします。
⇨ 公式サイトはこちら
公式サイトの[サンプルプログラムのダウンロード]ボタンをクリックします。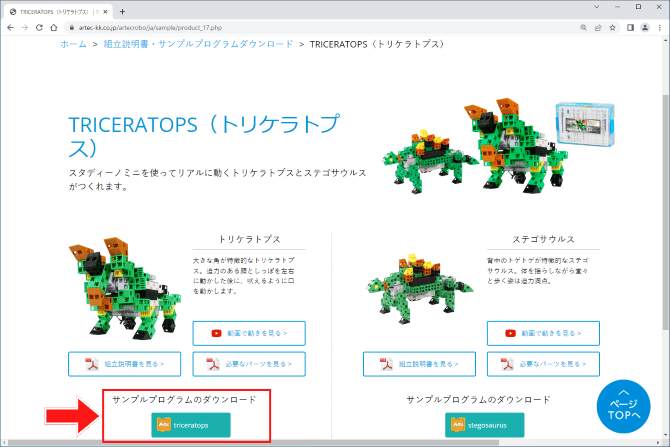
ダウンロードしたファイル(triceratops.bpd)がこちらです。
1. サンプルプログラムを開く
次はサンプルプログラムをプログラミングソフト(Studuino mini)で開きます。
プログラミングソフトを起動したら[ファイル > 開く]をクリックします。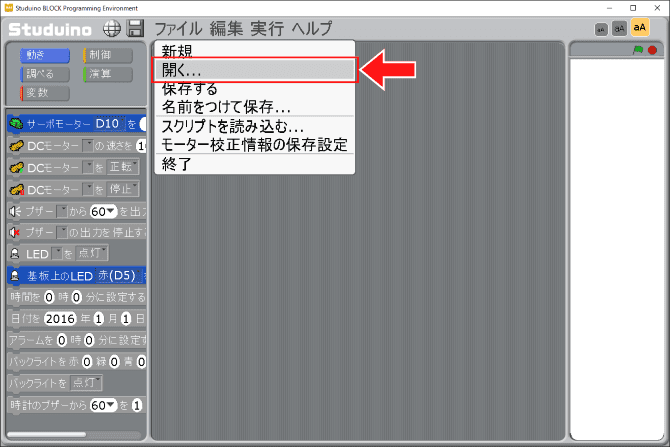
すると、プロジェクトを選択する画面が開くので、手順0.でダウンロードしたサンプルプログラムを選択します。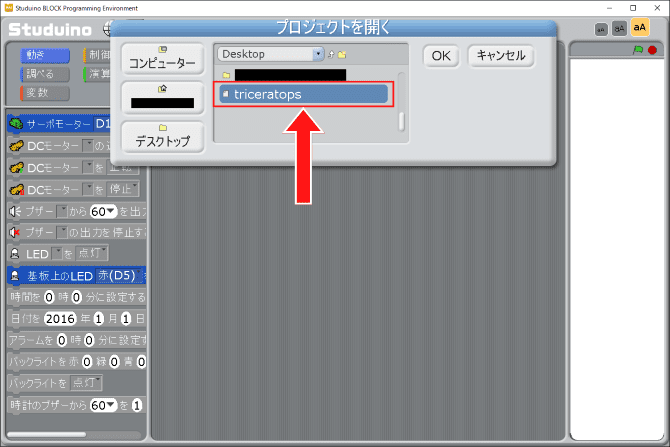
サンプルプログラムを開くとこんな感じです。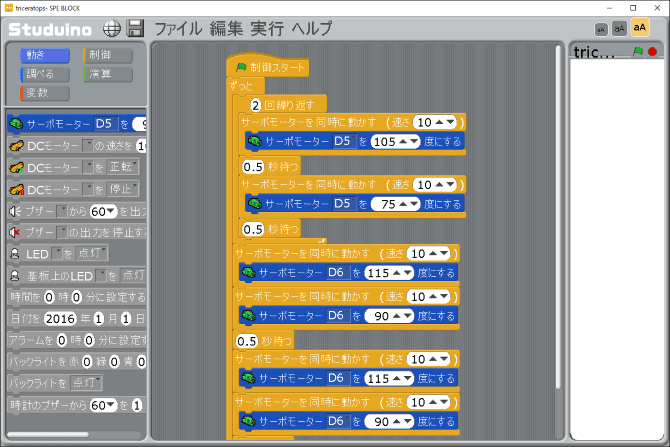
2. 入出力設定をする
次は基盤の入出力設定をします。
まず、[編集 > 入出力設定]をクリックします。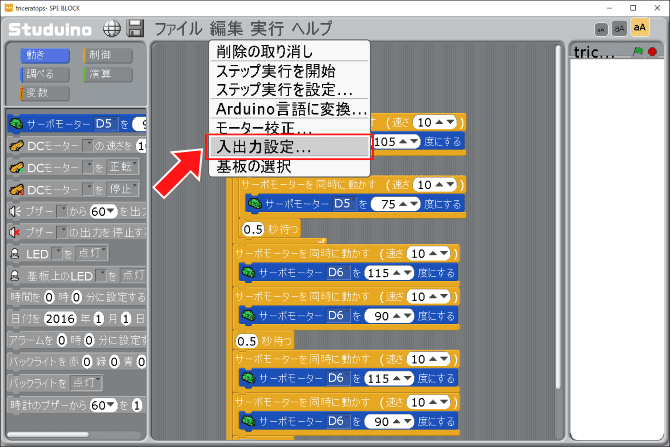
すると、入出力設定画面が開きます。図のようにD5とD6にチェックが入っています。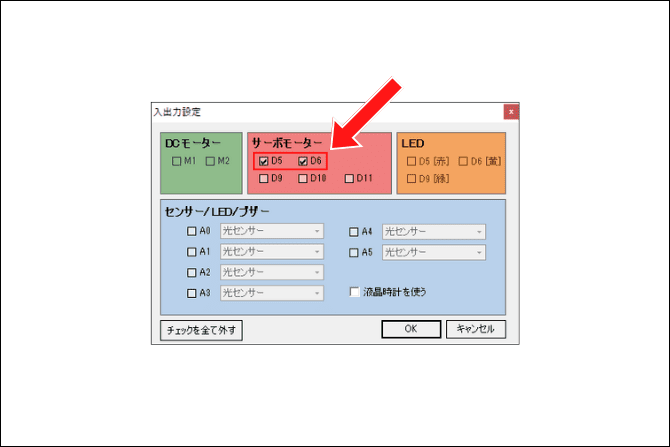
次は[チェックを全て外す]をクリックします。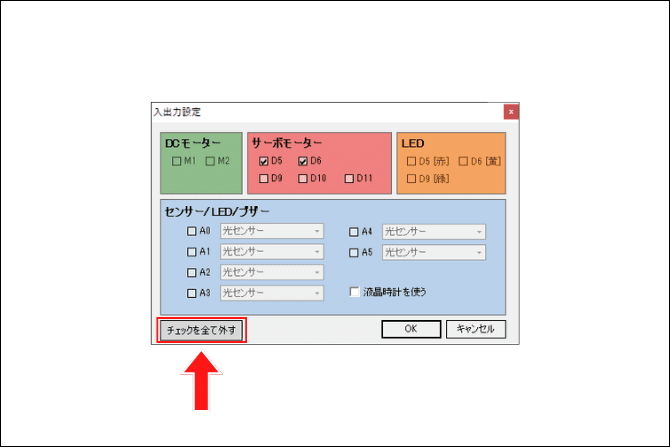
そして[D10]と[D11]にチェックします。また、LEDも使えるようになるので、今後のためにLEDもチェックしておきましょう。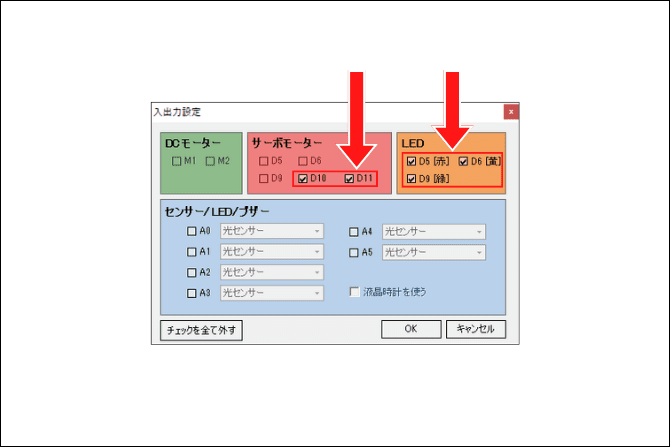
チェックし終わったら[OK]ボタンをクリックして完了です。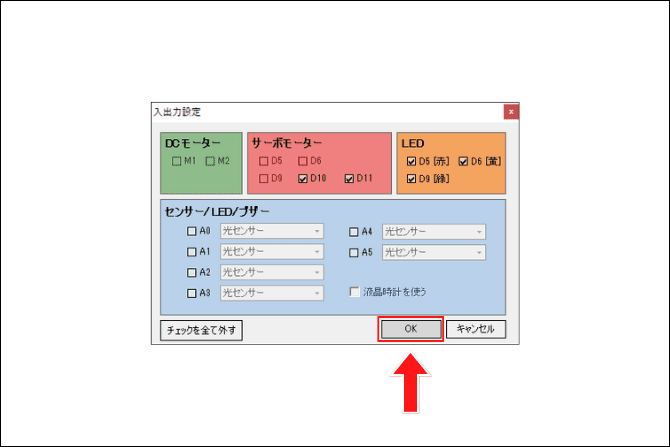
3. サンプルプログラムを修正する
最後は基盤の設定にあわせてサンプルプログラムを修正します。修正箇所は使用するサーボモーター部分です。
図のように該当箇所をクリックしてD5→D10、D6→D11に変更します。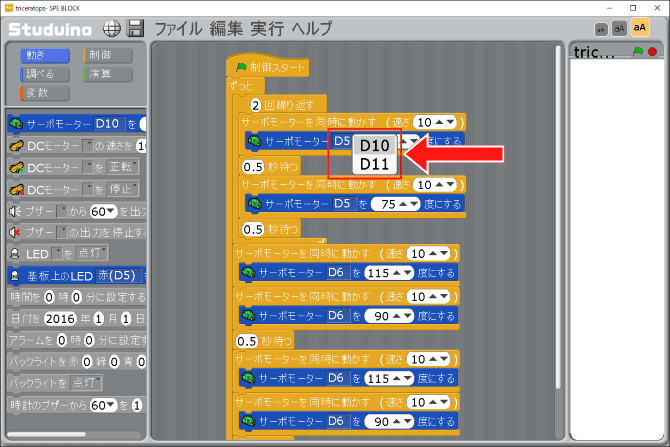
6箇所全て変更します。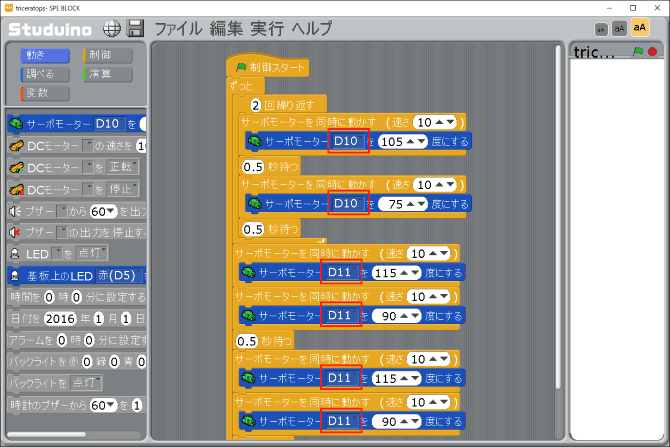
変更が完了したら[ファイル > 保存する]をクリックして保存します。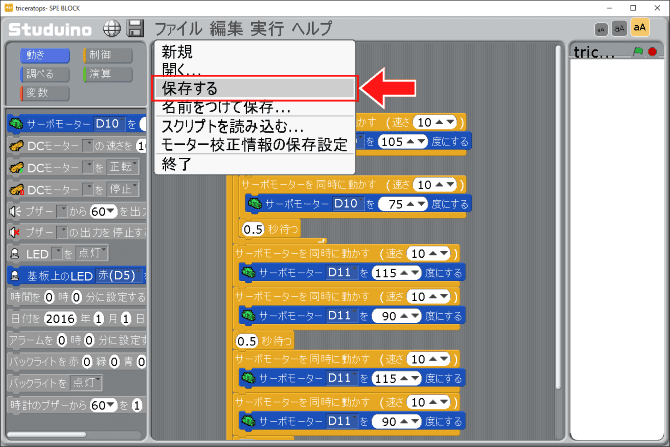
これで完了です。お疲れ様でした。
あとはロボットを組み立てて動かすだけ
これで「サーボモーターの校正」と「サンプルプログラムの修正」が終わりました。
あとは、ロボットを組み立ててプログラムを実行するだけです。動かし方も含めてレビューしているのであわせてご覧ください。

それではアーテックロボを楽しんでください(^_^)/~