

embotはダンボールでロボットを作り、スマホやタブレットでプログラミングして遊ぶプログラミングおもちゃです。
私はこれまで数多くのembot作品を作ってきました。なので、本記事では私がこれまでに作ってきたembot作品と、その作り方やプログラムの考え方を紹介します。
- embot作品集【考え方や作り方を解説】
embotはメーカーによるコンテストを定期的に開催しており、私も頻繁に応募しています。
このコンテストでは、主催者であり、embotの生みの親である「マスターヌー」から選ばれるとYouTube番組内で紹介されたり、景品がもらえたりします。
けっこう参考になるんじゃないかなと思うので、ぜひ最後までご覧くださいm(_ _)m
embot作品集【考え方や作り方を解説】
embotのミニコンテスト「embotでお題に答えまShow!」は毎回お題が出されて、それに答える形で作品を作って応募します。
とにかく明るいembot
Season1 第2回放送のお題は「笑える」です。この時に作った作品が「とにかく明るいembot」です。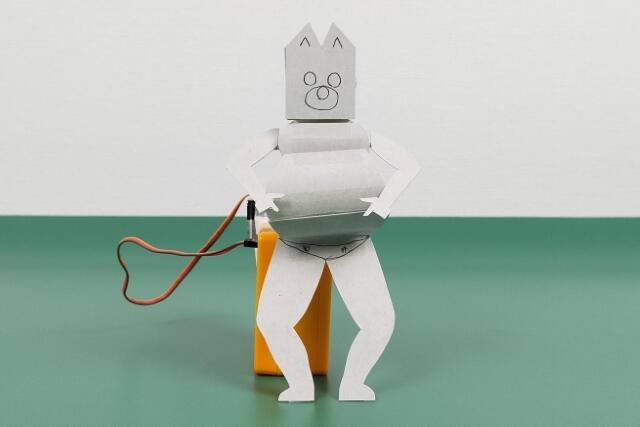
元ネタは皆さんご存知、あの芸人さんです。海外でも通用するネタが、今回のお題である「笑えるembot」にちょうど良いと思ったので作りました。
ギミックは結構こだわってまして、ポーズをとったときに顔が正面を向くようにしたり、パンツが隠れるようにしたりしています。
横から見ると仕組みがわかりやすいです。リンク機構を使って上半身を前に倒すと同時に顔が下を向かず、正面を向くようにしています。
この作品のポイントは顔が下を向かないようにすることでした。なので、どうしたら実現できるかなぁと考えた結果、リンク機構を使うことでした。
機構に関しては専門外なので、下記の本で勉強しています。かなり楽しいですよ。

また、番組内ではマスターヌーがリアクション付きで解説してくれてるので、ぜひYouTube番組もご覧ください。
猫ふんじゃった!
Season1 第3回放送のお題は「びっくり」です。この時に作った作品が「猫ふんじゃった!」です。びっくりした猫の表情を再現しています。
「びっくり」と聞いて最初に思い浮かべたのは猫がびっくりして驚いている様子でした。
なので、白目で口を開けて驚いている猫を再現することにしました。
また、猫はどういう時にびっくりするかなと考えた時に、尻尾を踏まれたら一番びっくりするかなということで、尻尾を踏まれたらびっくり顔になるようにしました。
顔のアップはこんな感じで、口はクランク機構を使って動かしています。
機構をもう少し工夫すれば1個のモーターで目と口を動かすことができたと思うのですが、私の実力では難しかったです。
また、白目になったあとに通常の目に戻ることで何度も遊ぶことができるようにしています。
怖いもの探しゲーム…
Season1 第4回放送のお題は「怖い」です。この時に作った作品が「怖いもの探しゲーム…」です。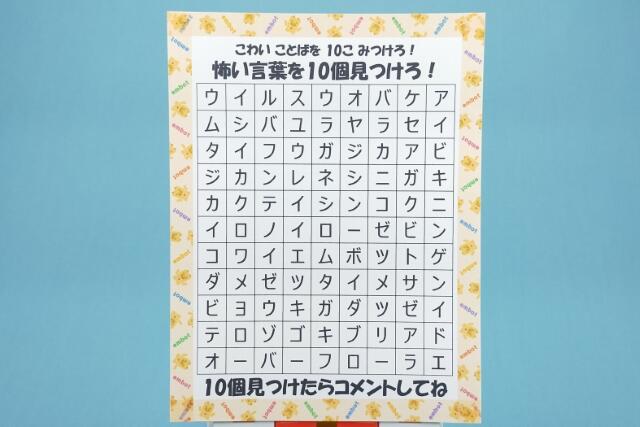
これは、カタカナが書かれたボードから怖い言葉を10個見つけるゲームです。実際に10個見つけるまでに何秒かかるか測ってみてください。
この作品は油断していると怖さが倍増すると思って作りました。
怖いもの探しゲームというタイトルにすることで、今回のお題である「怖い」部分はそこなんだなと油断させ、さらに言葉を探すことに意識を誘導し、油断させることで怖さが倍増するように考えました。

手を貸してくれる猫型ロボット
Season1 第5回放送のお題は「役に立つ」です。この時に作った作品が風で紙が飛びそうになったら押さえてくれるロボットです。
紙が飛びそうになるのを超音波センサーで検知し、猫が手で押さえてくれます。
構造はシンプルで超音波センサーで紙が飛びそうになったことを検知し、サーボモーターで前脚を動かしています。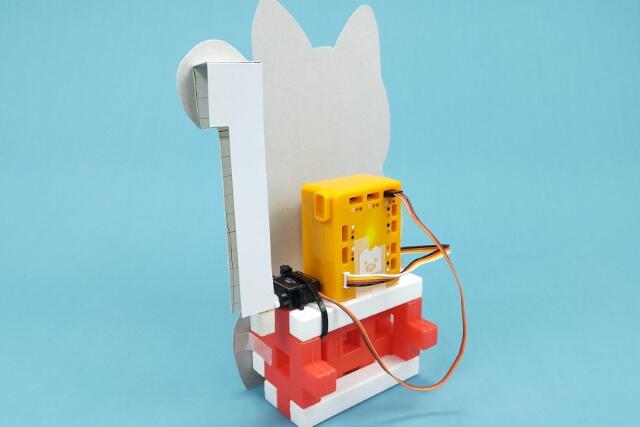
そして、今回のアイデアの発想は次のとおりです。
猫の手を活かせるロボットを考えた結果、今回の作品になりました。
ただ、実はもっと別の記憶から思いついた面もありまして、このネタは私が小学生の時に放送されていたマジカル頭脳パワー!!という番組に登場したクイズと出演者のやり取りを意識しました。
問題は「どんなに忙しい時でも猫の手を借りることはできない。YES or NO」みたいな内容で、出演者の一人がNO:借りられると答えました。
その出演者の答えは「半紙くらいだったら押さえられるんじゃない?」ということでNOでした。
ですが、正解はYES:借りられないです。なぜなら、猫に手はなく、あるのは前脚だから。
遊び半分
Season1 第6回放送のお題は「遊び」です。この時に作った作品が「遊び半分」です。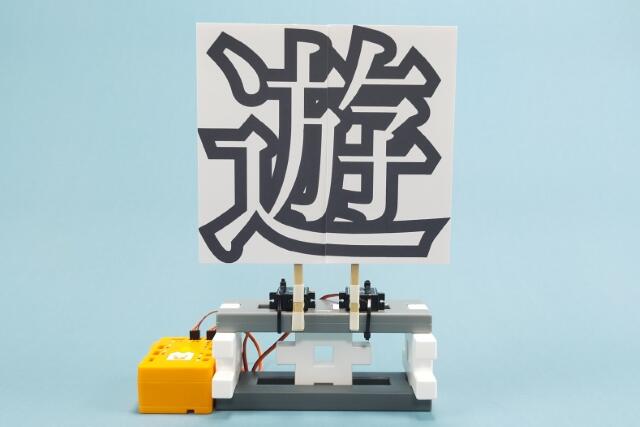
これは遊び半分で作った作品で、「遊」という字が半分になる作品です。
工作とプログラムはシンプルです。動画から想像つくんじゃないかなと。
ジャンプスキーembot
引き続き、Season1 第6回放送のお題は「遊び」です。タイミングよくボタンを押すとジャンパーがジャンプするゲームを作りました。
ジャンプ距離を競い合うゲームという計画だったのですが、残念ながら勢いが弱くてジャンプしませんでした…。
ジャンプ台はカム機構を使って、上げ下げしています。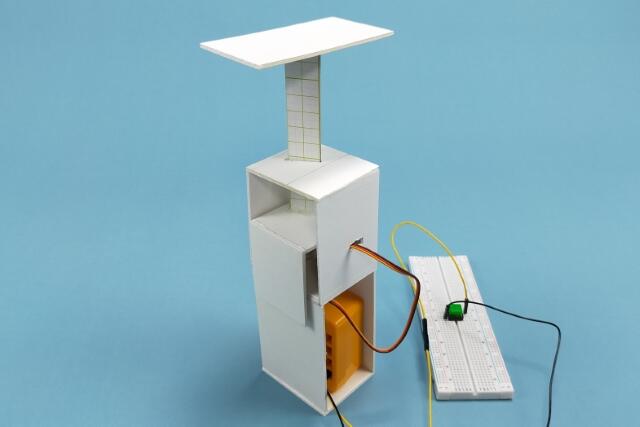
カム機構は中にしずく型のパーツが入っており、それが回転することでその上の板を上げ下げします。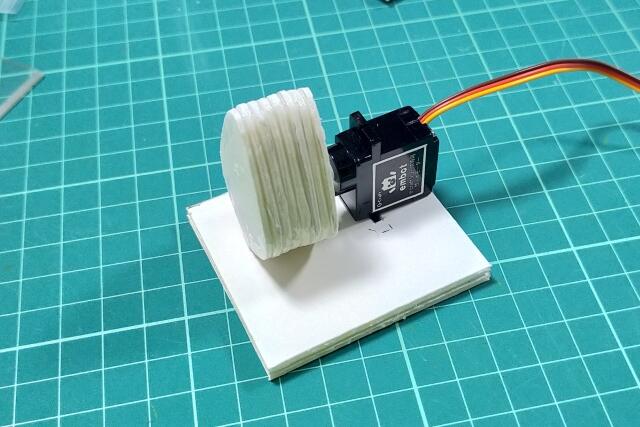
あと、ジャンパーは結構こだわってまして、スキー板にはアイスの棒を使ってます。また、イラストはEXCELで書きました。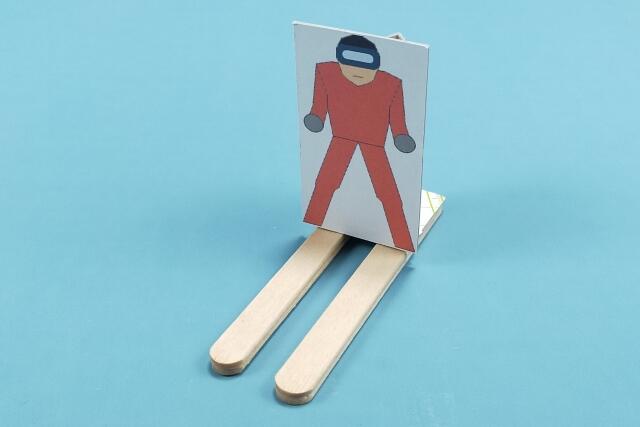
バッティングembot
引き続き、Season1 第6回放送のお題は「遊び」で、今回はボタンを押すとボールを打つロボットです。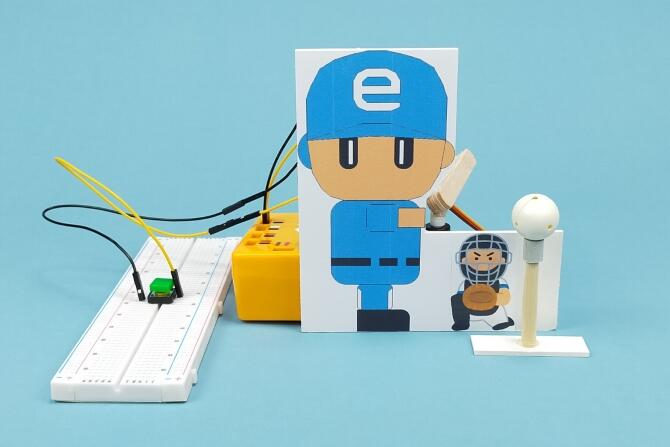
実際にボールを打つとこんな感じです。やっぱり、勢いが弱いですね。
後ろから見ると構造はシンプルです。
ピッチングembot
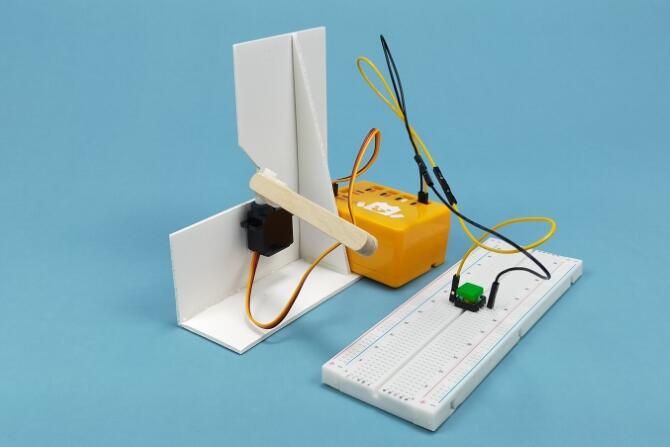
引き続き「遊び」をテーマに作ったロボットがボールを投げるロボットです。
ジョイスティックで投げる方向を、ボリュームつまみで投げる角度を調整できるようにしています。そして、ボタンを押すと投げます。
構造はこんな感じでして、投げる方向を調整するためのサーボモーターとボールを投げるサーボモーターの2個があり、ジョイスティックとボリュームつまみで変更できるようにしています。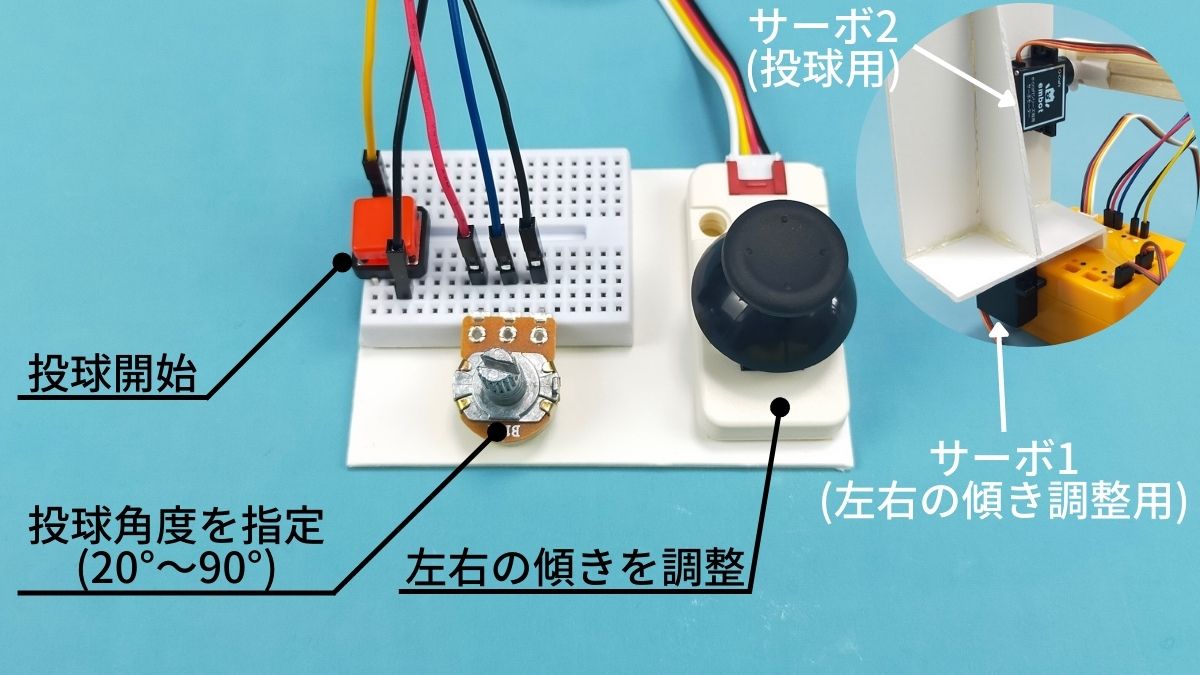
プログラムはけっこう複雑です。全体像は下記の通りで、ボタンが押されてない間はジョイスティックの値に応じて左右に回転させます。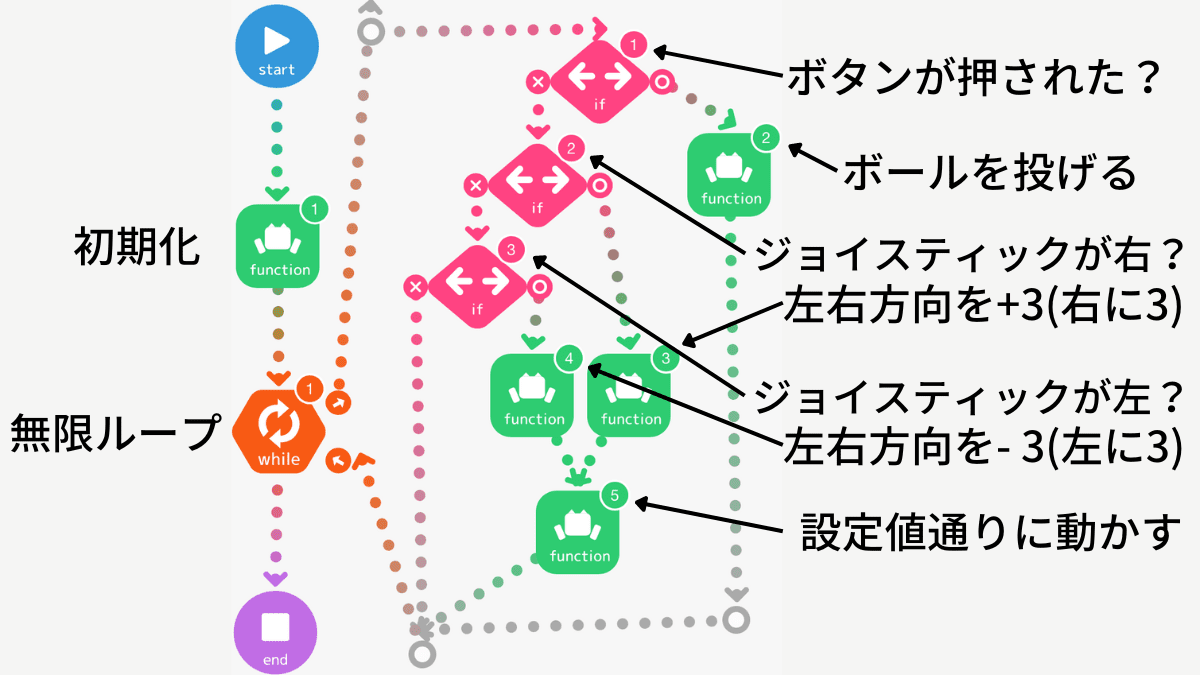
そして、function2のボールを投げる関数です。ボリュームつまみの値(0~4095)を投球角度(20°~90°)に変換するために写像という考え方を使っています。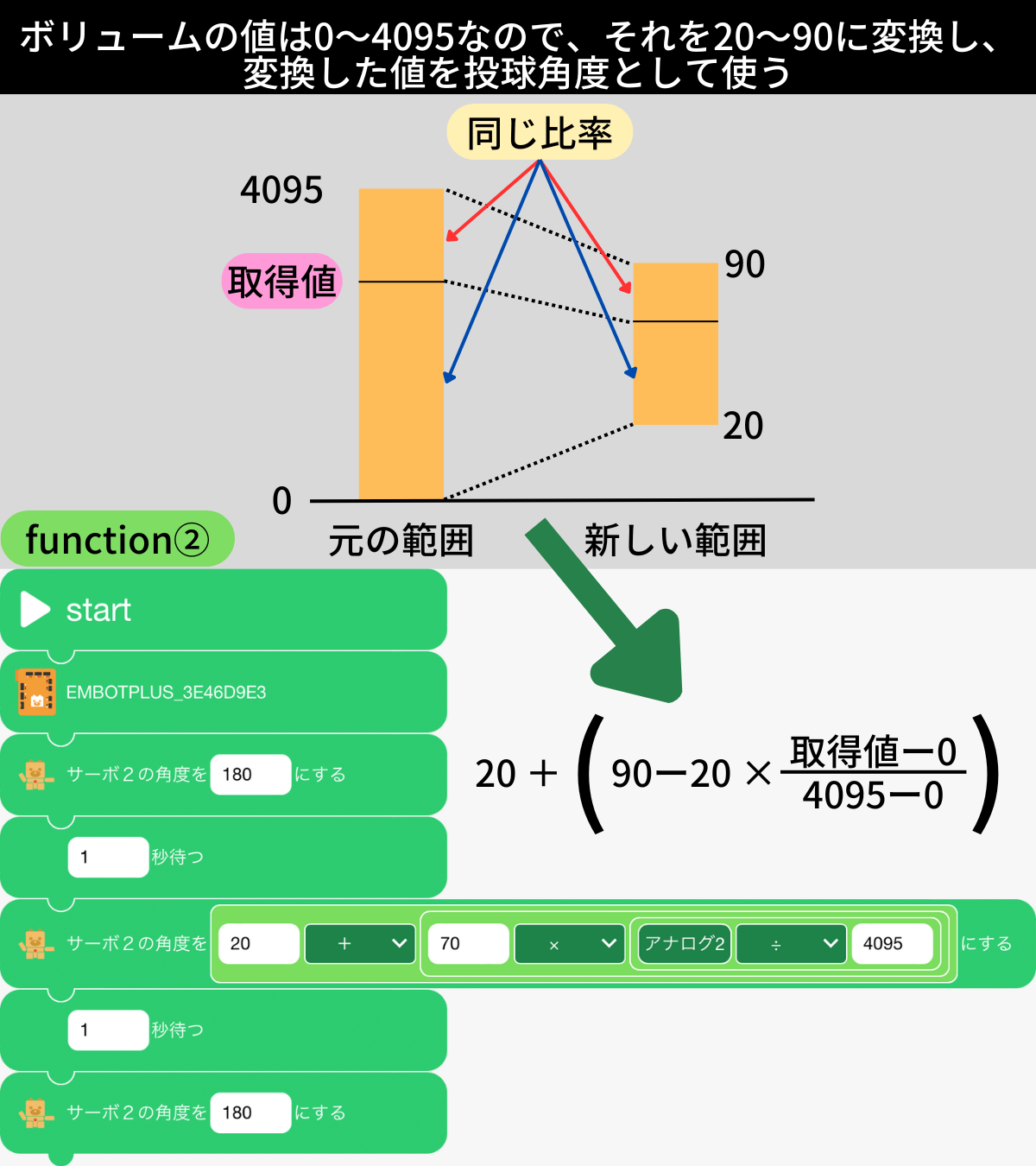
洗顔embot
Season1 第7回放送のお題は「朝」です。この時に作った作品が洗顔をテーマにしたロボットです。
まずは動画をご覧ください。
朝というお題はなかなか難しかったので、 他の人とネタが被らないように「洗顔」をテーマに選びました。
まずは朝から連想されるものを思いつく限り挙げました。
この中で誰も作らなそうなものとして「洗顔」を選びました。
ちなみに、作品を横から見ると構造がわかりやすいです。
バイナリタイマー
いよいよSeason2が始まりました。
Season2はマスターヌーが視聴者からのお題に答えるという形式です。ただ、第5回放送から視聴者からの作品募集も始まったので応募してみました。
このときのお題は「タイマー」だったので、2進法でカウントダウンするタイマーを作りました。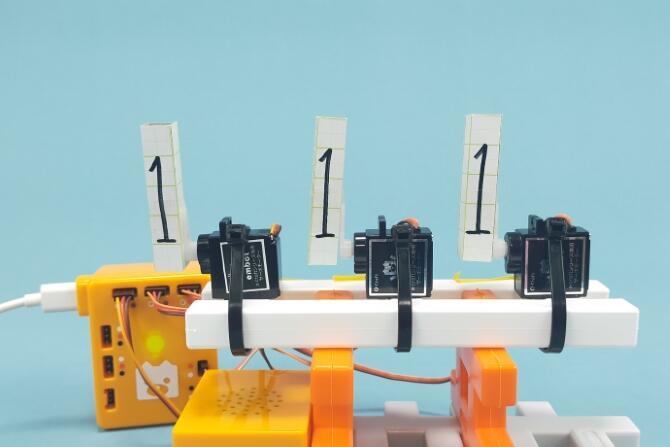
まずは動きを見てみてください。
2進法とは0と1の2つの文字で数値を表す方法です。普段使うのは10進法ですね。10進法は0~9の10個の文字で数値を表す方法です。
それぞれを対応表にすると下記の通り。
| 10進法 | 2進法 |
| 0 | 000 |
| 1 | 001 |
| 2 | 010 |
| 3 | 011 |
| 4 | 100 |
| 5 | 101 |
| 6 | 110 |
| 7 | 111 |
そして、プログラムはけっこう凝ってまして、関数呼び出しをうまく活用しています。
タイマーはふせんで1~7秒を設定することができ、その値をチェックしてfunctionのスタート位置を決定しています。(if文)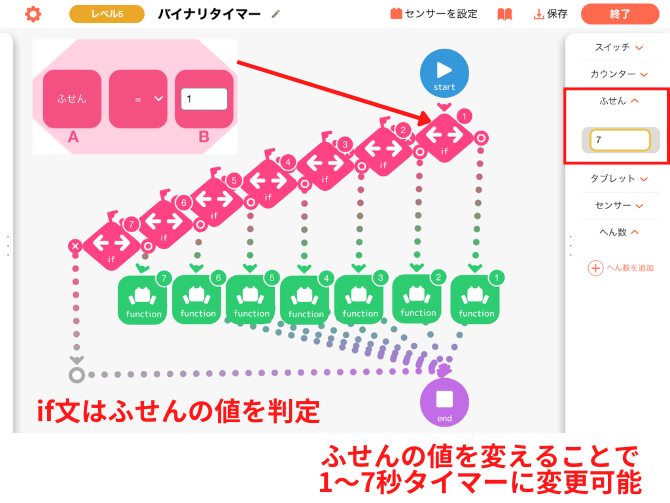
function1は2進法で1を作り(右のサーボだけ立てる)、1秒待ち、0秒を作り、音を鳴らしています。そして、function2は2進法で2を作り(中央のサーボだけ立てる)、1秒待ち、function1を呼び出しています。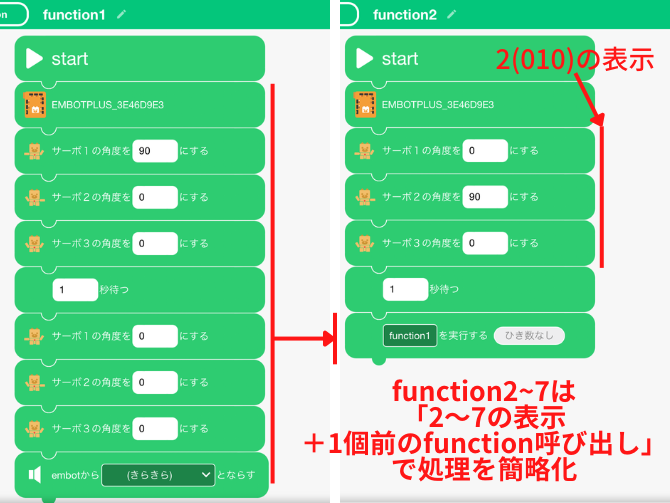
こうすることで、function2を実行すると2・1・0とカウントダウンします。function3では3を作り、function2を呼び出すことで、3・2・1・0とカウントダウンします。
このように、前の数値を作る関数を呼び出すことで、少ないプログラムで複雑な仕様を実現しています。
ゆらゆらシーソーゲーム
Season2 第6回放送のお題は「ジャイロセンサー」です。なので、タブレットに搭載されているジャイロセンサーを使って遊ぶシーソーゲームを作りました。
こんな感じで遊びます。
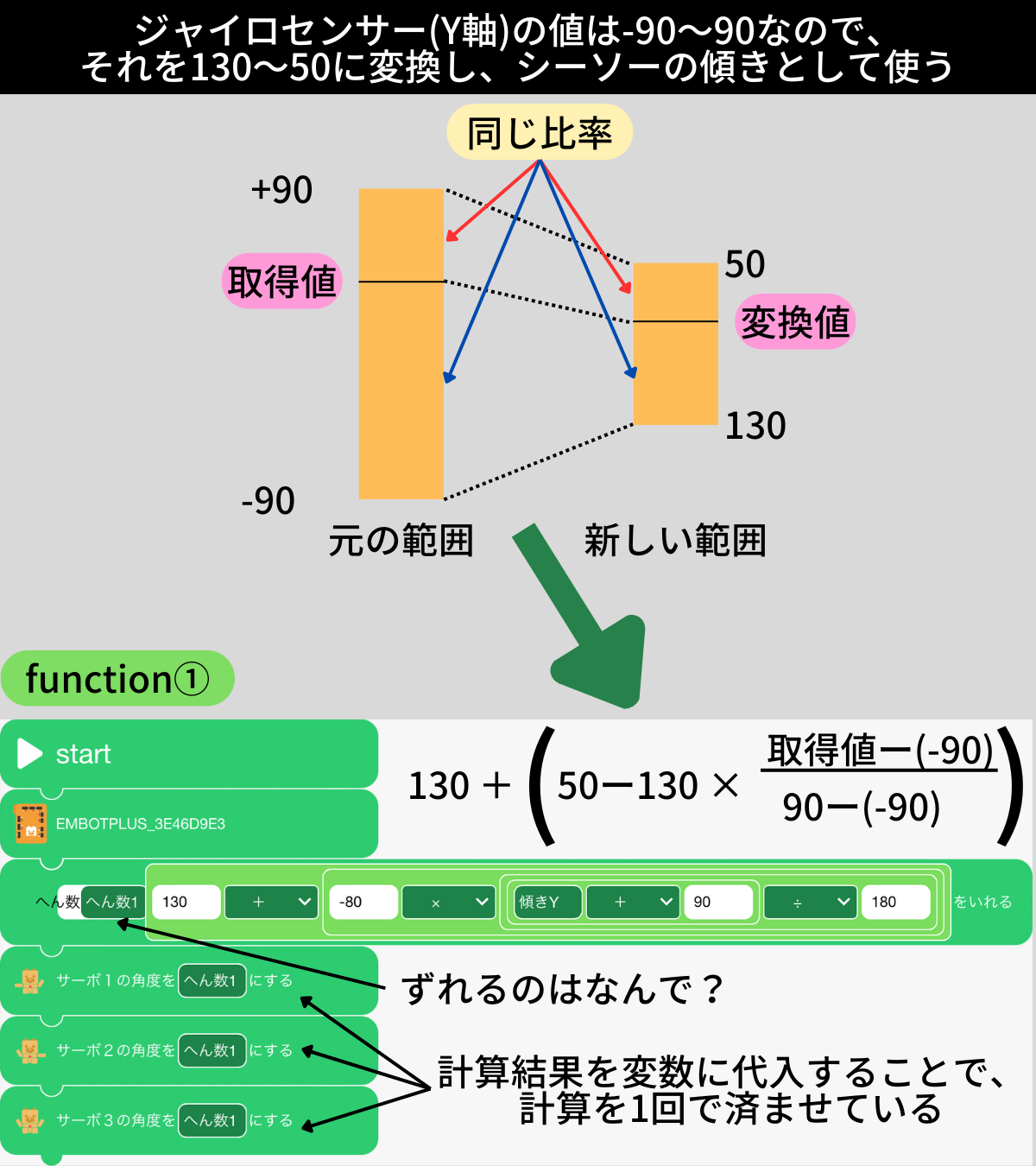
プログラムですが、タブレットの傾きとシーソーの傾きを連動させる部分は工夫しています。
タブレットの傾きをそのままシーソーに反映すると傾きすぎるので、傾く範囲を130度~50度に制限しました。(90度(水平状態)を中心に±40度です)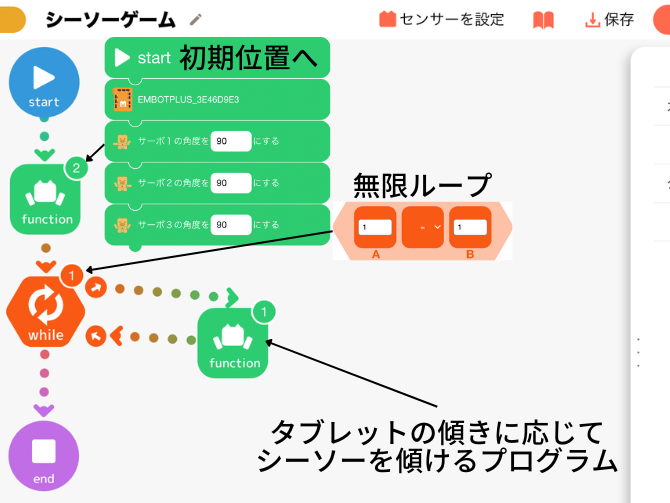
うさちゃんembot ブロックVer.
Season2 第7回放送のお題は「embotを2個使った作品」だったのですが、景品で頂いたLEGOブロックをembotに取り付けられる治具を活用した作品を作ることにしました。
それが「うさちゃんembot ブロックVer.」です。ダンボールのembotをブロックで再現しました。
特別な動きはありません。通常のプログラムです。
ぐるっと一周するとこんな感じ。(タップで拡大)



スマホで操縦!embotカー
Season2 第8回放送のお題は「車」だったので、景品で頂いたLEGOブロックをembotに取り付けられる治具を活用して車を作ることにしました。
これはタブレットを前後左右に傾けることで操縦する車です。
操縦するとこんな感じです。ちょっと操作しにくいのが課題です。
前輪はサーボモーターに連動して左右に動く構造です。ただ、embotに付属のサーボモーターだと取り付けが難しいので、LEGOブロックと互換性があるサーボモーターを使用しました。
また、後輪は360°回転しないといけないので、回転サーボを使用しています。
使用しているのは下記の商品です。

ただし、LEGOブロックのタイヤとサーボモーターを連結する方法が無いので、回転サーボに付属していた円形のサーボホーンをタイヤに接着しました。
プログラムの全体像はけっこうスッキリです。function2で前輪と後輪の動きをプログラミングしています。
タブレットの傾きは-90°~90°で、回転サーボを動かすには-6~6にしないといけないので、下記の変換式で変換しています。 
そして、タブレットの傾きを前輪の左右回転に変換するには、いつもおなじみの写像関数を使っています。 
embotカー Ver.2
Season2 第9回放送のお題は「楽器」でしたが、間に合わなかったので、前回作ったembotカーを改良しました。
改良点は下記のとおりです。
- 操縦:タブレット → ジョイスティック
- 前輪:LEGO互換モーター → 純正モーター
- 後輪:タイヤを接着 → サーボモーターとLEGOの軸を直接取り付け
前回作ったembotカーはタブレットを傾けて操縦していたのですが、ちょっと操縦しにくかったので、ゲーム機のコントローラーにあるようなジョイスティックを使って操縦できるようにしました。
また、前輪にはLEGO互換モーターを使っていたのですが、embotに付属する純正モーターを使えるようにしました。
embotの純正モーターはLEGOブロックにそのまま接続できないので、3Dプリンターで自作したパーツを使い、接続できるようにしています。
十字の軸とサーボ軸を連結できる部品とサーボモーターを固定する部品を作りました。
実際に動かしてる様子はこんな感じです。
そして、プログラムはかなり工夫しています。ジョイスティックを前後左右に動かすときに各タイヤ(モーター)を下記のようにしています。
- 前に倒す:右後輪を正転、左後輪を逆転
- 後ろに倒す:右後輪を逆転、左後輪を正転
- 左右に倒す:前輪を左右に動かす
プログラムの全体の流れは前回と同じです。
前回は前輪の値だけを写像関数で変換していたのですが、今回は後輪の値もあわせて変換します。
処理を短くするためには処理を共通化すると良いので、変換前後の値をひき数にし、functionを呼び出すたびに変換式が変わるようにしています。
ひき数とへん数は下記のようにしています。
- ひき数1:最小(元)・・・ジョイスティックの最小値
- ひき数2:最大(元)・・・ジョイスティックの最大値
- ひき数3:最小(新)・・・モーターの最小値(角度 or 速さ)
- ひき数4:最大(新)・・・モーターの最大値(角度 or 速さ)
- ひき数5:取得したジョイスティックの値
- へん数1:変換後の値を入れる
- へん数2~5:途中の計算結果を入れる
上記を図にすると下記の通り。 
そして、今回は番組内で紹介されました!しかも、過去一褒められたので、ぜひご覧ください!!
ピアノembot
Season2 第10回放送のお題は「笑える」でしたが、前回間に合わなかった「楽器」のお題でピアノを作りました。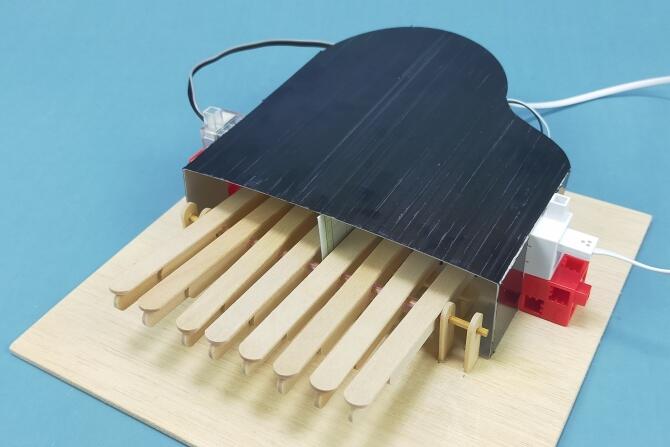
鍵盤を押すと音が鳴るピアノです。ちょっと音が小さいです。すみません。(マイクの性能が悪くて…)
この作品のポイントは鍵盤が押されたことをどうやって検知するか?ということです。
鍵盤1個1個に押されたことを検出するスイッチを用意する方法も考えられますが、embotコアには2つしかスイッチを接続できないので、赤外線フォトリフレクタ(アナログセンサー)を使って押された鍵盤を検出することにしました。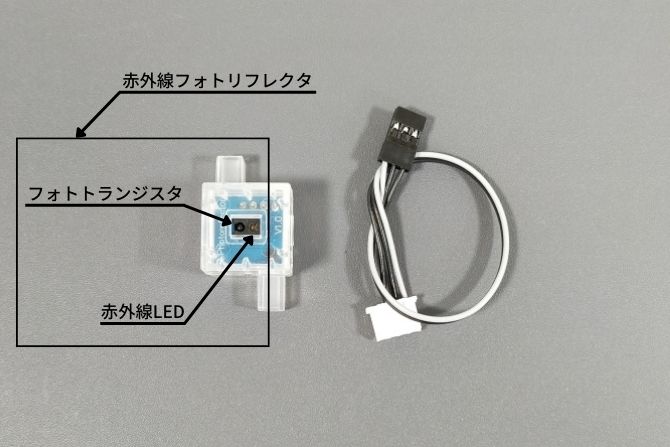
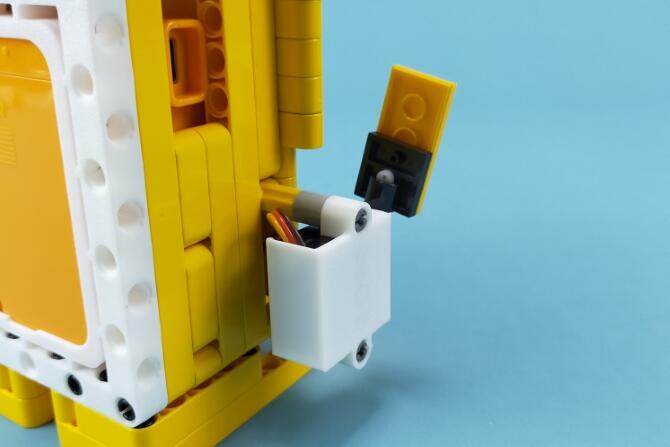
これを鍵盤の横に設置し、押された鍵盤までの距離でどの鍵盤が押されたか検出しています。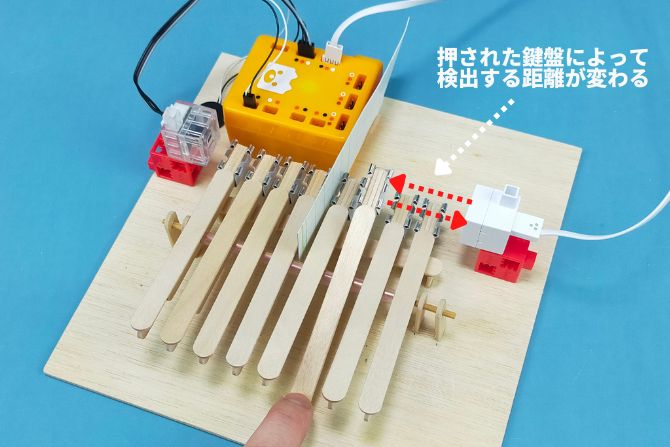
プログラムの全体像はこんな感じです。if文でセンサー値を細かく分岐し、どの音を鳴らすか判定しています。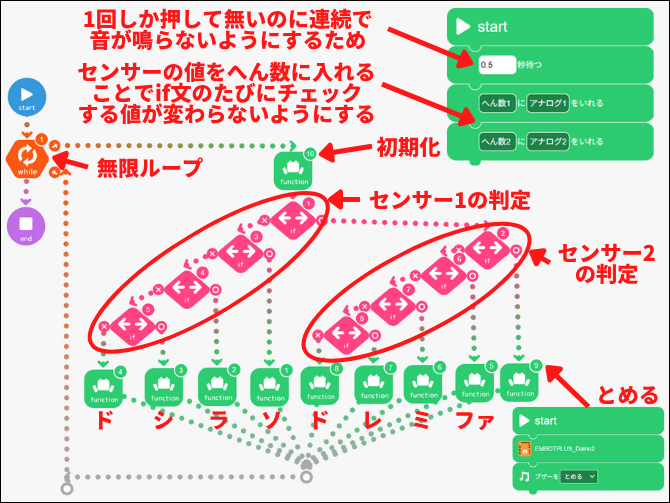
各if文と関数の値はこんな感じです。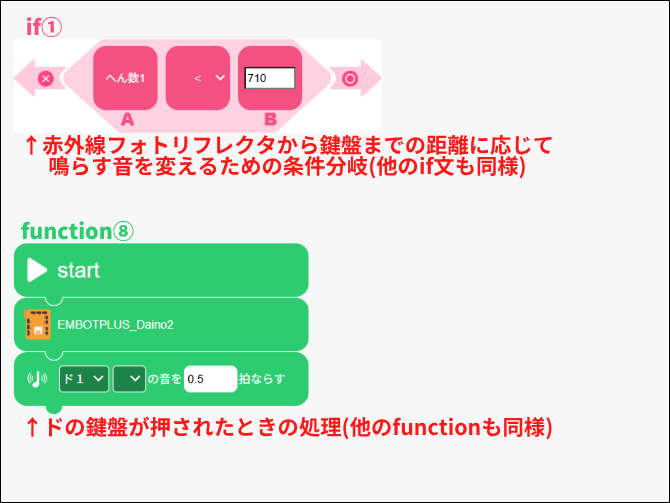
また、今回も番組内で紹介されました!ぜひご覧ください!
キラリン貯金箱\NEW/
Season2 第11回放送のお題は「貯金箱」だったので、お金を入れると音が鳴る貯金箱を作りました。
コインをレールに置くと賽銭箱に入り、音が流れます。ちょっと音が小さいです。すみません。(マイクの性能が悪くて…)
この作品のポイントはコインを検知する方法です。
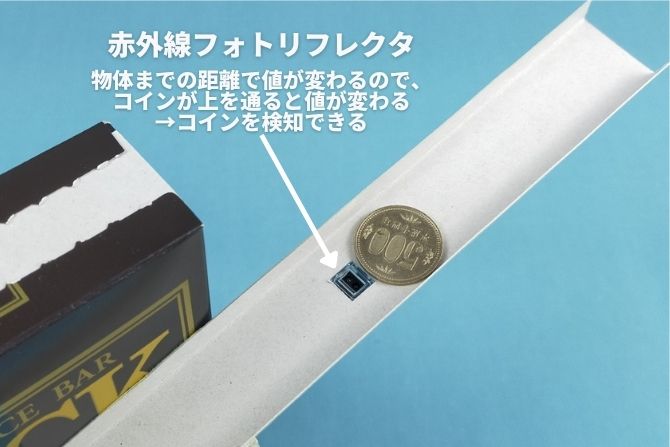
今回は、前回使用した赤外線フォトリフレクタ(アナログセンサー)を使ってコインが通過したことを検知することにしました。
こんな感じでレールにセンサーを設置し、コインが通過することでアナログセンサーの値が変わり、それでコインを検知しています。
プログラムの全体像はこんな感じです。wait文でコインを検知するまで待ち、コインを検知したら音を鳴らしています。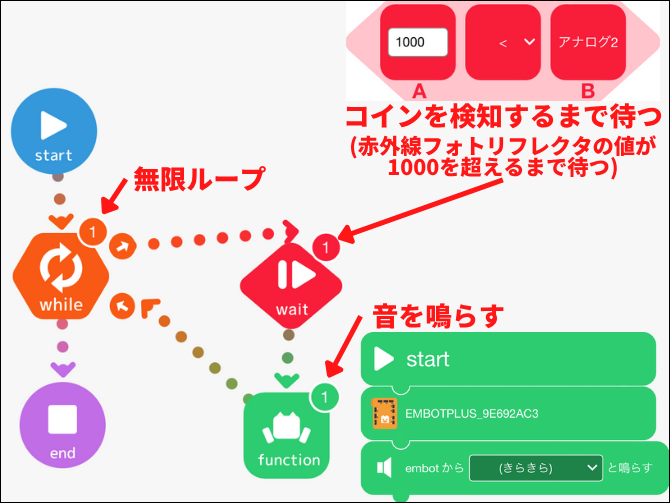
ちなみに、最初はデジタルセンサーを使う方法を考えました。
デジタルセンサーの+とーをレールに配置し、その上を金属のコインが通ると電流が流れてONになる、これを利用してコインを検知することを考えました。
ここまでは今回の作品について解説しましたが、そもそも作りたかった貯金箱はこれではなく、すべてのコインを見分ける貯金箱でした。
次の仕組みで見分ける方法を考えました。
- wait文でコインを検知するまで待つ
- コインを検知したらfor文を10回まわす
- 10回のうちにコインを検知する回数をカウントする
- カウントした回数でコインの種類を見分ける
上記のとおりです。500円玉のように大きいコインはセンサーの上を通過する間に何度もセンサーに反応します。
一方、1円玉のように小さなコインは反応する回数が少ないです。
つまり、反応する回数(カウントした回数)に応じてコインを見分けられると考えました。
結果はうまくいきませんでした。アプリの動作が重くてwait文でコインを検知したあとのfor文までラグがあり、センサーに反応することなくコインが通過してしまいました…。
また、今回も番組内で紹介されました!ぜひご覧ください!
そして、番組内で言及があった点について下記に回答します。
- 賽銭箱は貯金箱に良さそうだったのでそのまま使いました。(100円です)
- アイスの箱はレールを固定するための基礎を作る時間がなかったので、身近にあった箱をそのまま使いました。
- それに賽銭箱と近い色なのも良いかなと。
まあ、コインを検知する仕組み作りに時間がかかったので貯金箱部分の制作を簡略化したということです。
まとめ
作品を作り次第、今後もこの記事を更新していくので作品づくりの参考にしていただければ嬉しいです!
また、小学8年生の付録「F503i」の使い方やF503iとembotを連携した作品は下記の記事にまとめているので、あわせてご覧ください。

それでは、embotを楽しんでください(^_^)/~
