

以前レビューした「WhalesBot E7 Pro」には12種類の作例があります。
今回はその中の一つの「ディスカバー」について詳しく紹介します。
- 【WhalesBot E7 Pro】ディスカバーのレビュー
ディスカバーは赤外線センサー、押しボタン、グレースケールセンサーを搭載した車です。
障害物などを検出して動きを変えることができます。

スポンサーリンク
![]()
【WhalesBot E7 Pro】ディスカバーのレビュー
「サイ」の分解
今回は、前回作った「サイ」を分解するところから始めます。
私は5分くらいで分解できました。小さなパーツは予め仕分けしておくといいですよ。
組み立て
組み立ては専用アプリの説明書を見ながらおこないます。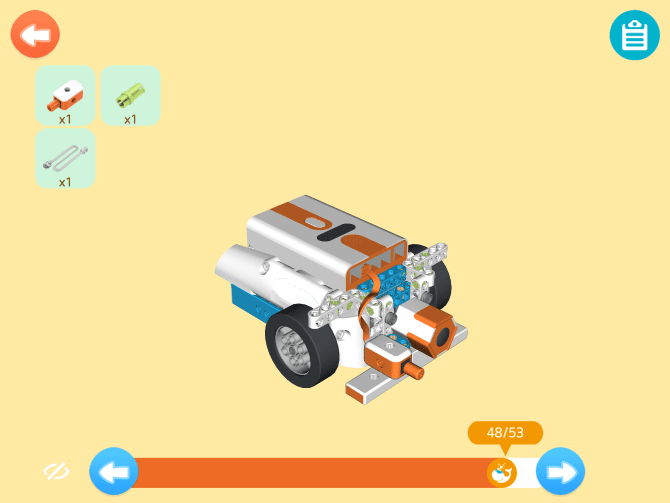
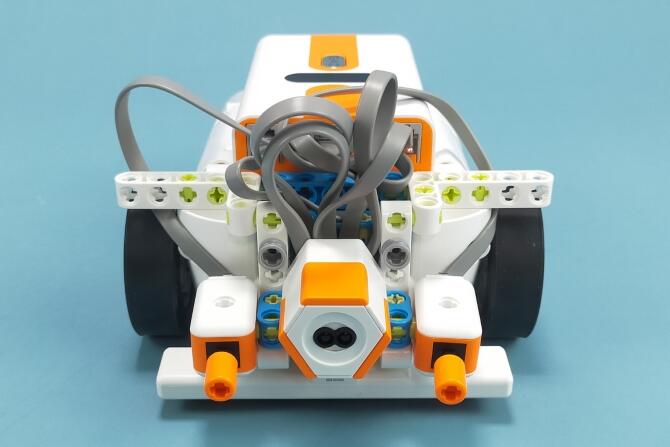
完成!
そして、完成したものがこちらです!20分くらいで完成しました。
後ろから。後輪はボールタイプです。
ぐるっと一周するとこんな感じ。(タップで拡大)

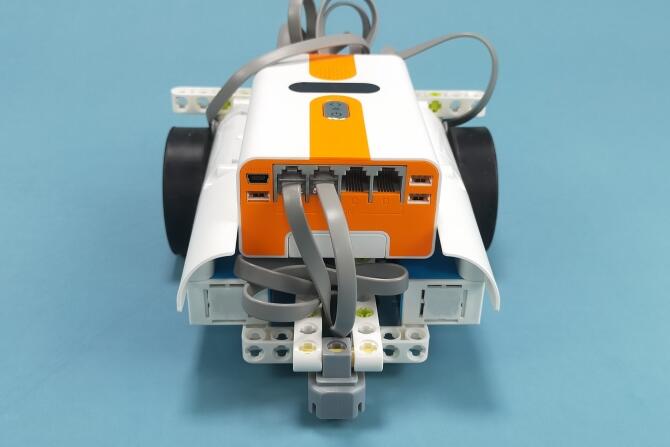

底面はこんな感じ。タイヤの軸がちょっとイマイチで、走ってると崩れやすいです。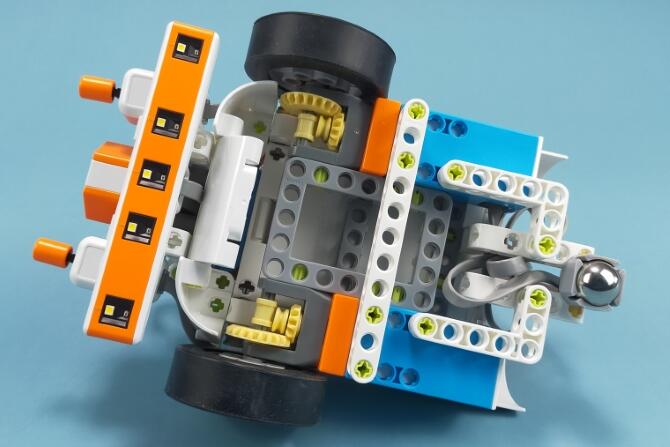
あおり気味に。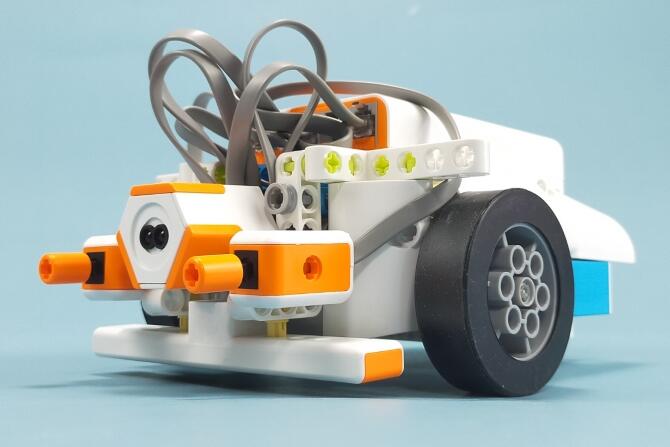
そして、ペットボトルと比べるとこんな感じです。
手動で可動する箇所
手動で可動する箇所はありません。
リモコン操縦
リモコン操縦で可動する箇所は次のとおりです。
- 右車輪
- 左車輪
操縦は専用アプリでおこないます。ゲームのコントローラーみたいです。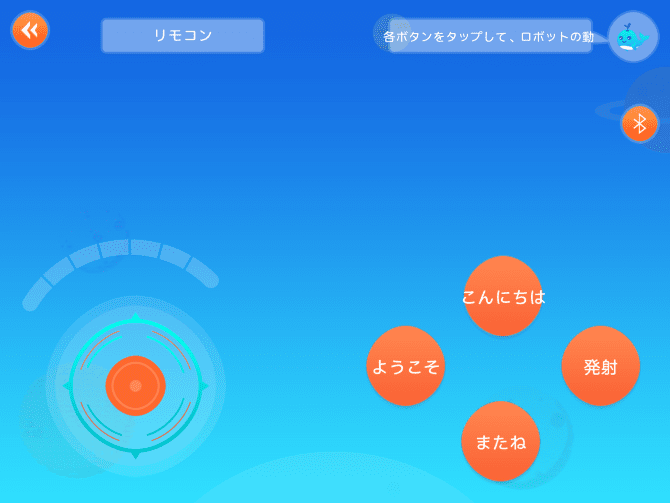
実際に動かしてみた様子がこちらです。左右それぞれのタイヤにモーターが使われているので、回転もできます。
プログラミング
プログラムで動作する箇所は次のとおりです。
- 右車輪
- 左車輪
実際に動かしてみた様子がこちらです。障害物を見つけると後退して向きを変えるプログラムです。赤外線センサーのみを使っています。
今度は押しボタンを使う例を作りました。障害物にぶつかると向きを変えるプログラムです。右のボタンがぶつかると左に、左のボタンがぶつかると右に方向転換をします。
結論:センサーマシマシのロボットカー
3つもセンサーを搭載していて面白い作例でした。
グレースケールセンサーを使うプログラムは作りませんでしたが、黒い線に沿って走るライントレースプログラムも作れますよ。
また、他の作例のレビュー記事もよろしければどうぞ。












それでは、WhalesBot E7 Proを楽しんでください(^^)/~~~