
以前レビューした「WhalesBot D1」には21種類の作例があります。
今回はその中の一つの「ロバ」について詳しく紹介します。
▼本記事の内容
- 【WhalesBot D1】ロバのレビュー
ロバは四本脚でトコトコ歩くロボットです。ロバ自体にモーターを搭載するわけではなく、遠隔で動かします。

スポンサーリンク
![]()
【WhalesBot D1】ロバのレビュー
「F1カー」の分解
今回は、前回作った「F1カー」を分解するところから始めます。
私は10分くらいで分解できました。小さなパーツは予め仕分けしておくといいですよ。
組み立て
組み立てはアプリの説明書を見ながらおこないます。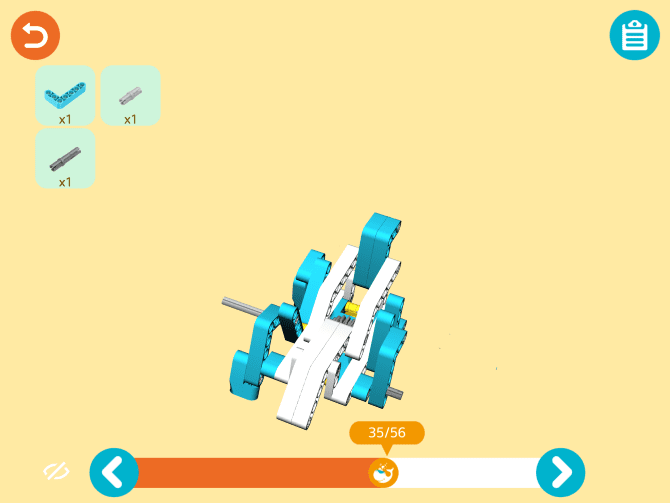
完成!
そして、完成したものがこちらです!30分くらいで完成しました。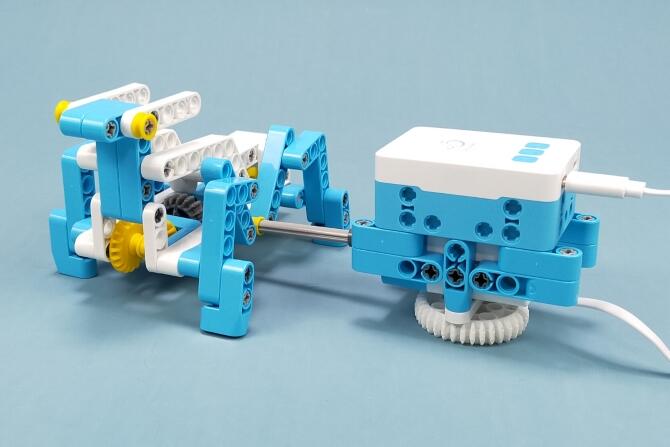
ロバとそれを動かす動力源で構成されてます。
ロバのアップです。う~ん、あんまりロバには見えないですね。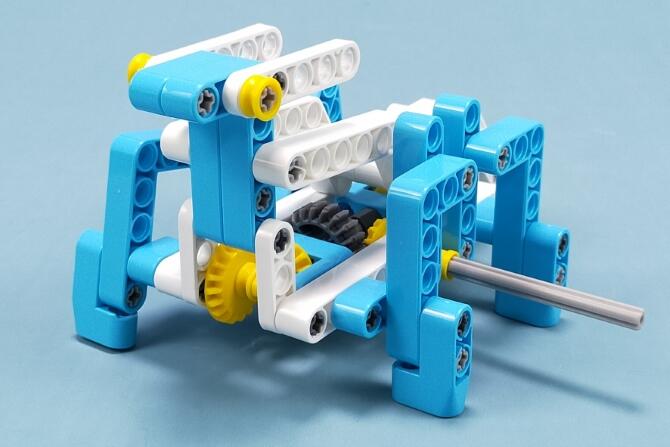
後ろから。ちゃんと尻尾もあります。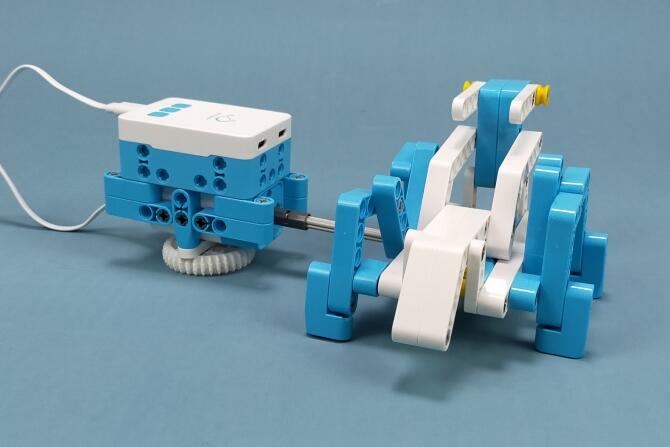
底面です。前後左右の脚を動かすので、けっこう入り組んでます。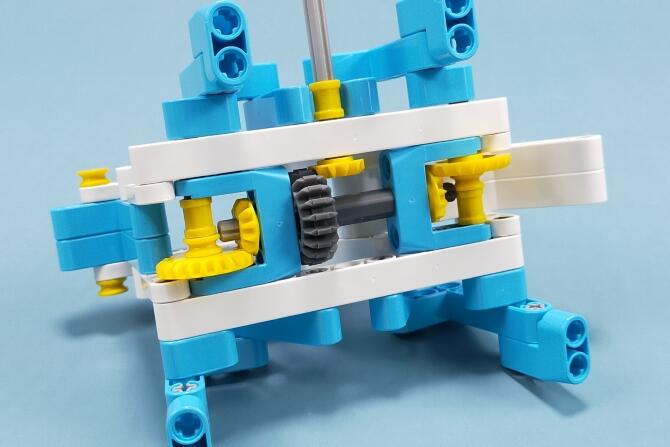
動力部分です。モーターの回転をそのまま伝えます。ロバ側で脚の動きに変換します。
あおり気味に。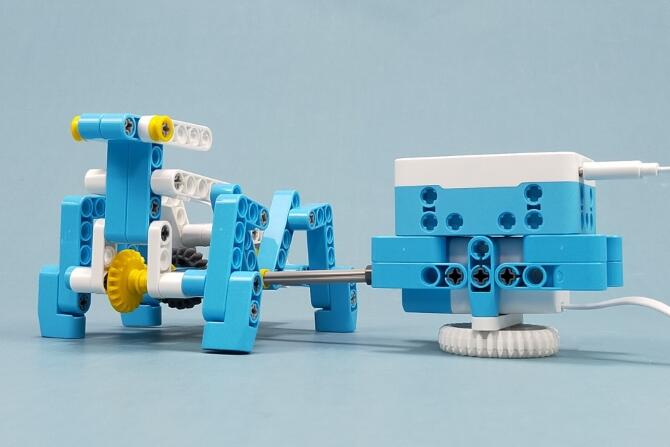
そして、ペットボトルと比べるとこんな感じです。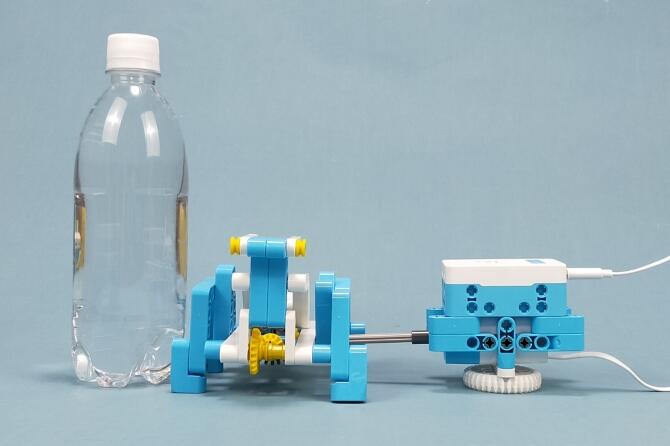
ちょうどいい大きさです。
手動で可動する箇所
手動で可動する箇所は次のとおりです。
- 動力源の回転軸
動力源の下の大きなギアはくるくる回転します。これのおかげで、ロバが動力源を中心に動きます。
プログラミング
プログラムで動作する箇所は次のとおりです。
- 脚
実際に動かしてみた様子がこちらです。けっこうきれいにトコトコ歩きます。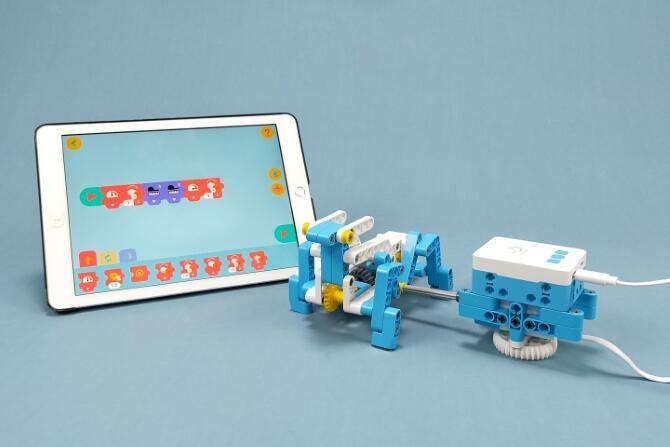
さらに、プログラミングせずに動かしてみました。
ちゃんと大地を踏みしめながら歩いてますね。大体こういうのは滑ってあまり前に進めないんですけどね。
結論:しっかり歩けるロボット
思いの外しっかり歩いていました。回転運動を歩行動作に変換する機構はすごいですね。
また、他の作例のレビュー記事もよろしければどうぞ。


ちょっとずつステップアップできるので、飽きずに長く遊べますよ。
それでは、「WhalesBot D1」を楽しんでください(^^)/~~~